PRE2019 3 Group8
Group Members
| Name | Study | Student ID | |
|---|---|---|---|
| Teis Arets | Psychology & Technology | 1261991 | t.t.j.e.arets@student.tue.nl |
| Tom Bergmans | Psychology & Technology and Electrical Engineering | 1253565 | t.j.p.bergmans@student.tue.nl |
| Nynke Boonstra | Psychology & Technology | 1251155 | n.boonstra@student.tue.nl |
| Bob Hofstede | Psychology & Technology | 0950282 | b.m.hofstede@student.tue.nl |
| Emile Merle | Computer Science | 1244746 | e.y.h.merle@student.tue.nl |
Plan
Abstract
In this article one can read about our literature study towards a robotic study buddy that can help elementary school children with a low IQ, specifically between 70 and 85. The Dutch government stimulates children with a physical or mental ability to follow regular education as much as possible, which means this target group often finds itself in a regular school class. As a result, elementary school classes are a diverse collection of children of all kinds of intellectual levels, making it difficult for teachers to provide an appropriate way of education for everyone. Research showed that low-IQ children often lack motivation to study and are reluctant to show they do not understand school material. Therefore, they might easily fall behind the rest of the class, but teachers often lack the time and resources to help them appropriately. As a solution, we propose the concept of a robotic study buddy based on the robot Haru that specifically focuses on motivating children and providing them a proper explanation of any topic on a virtual learning platform right after it has been taught by the teacher. This way, children are prevented from not speaking up if they fail to understand some topic. Our research showed that the robot is required to draw children's attention appropriately, but it should also maintain it during the teaching session; keep the interaction infromal with humor; and make sure positive, non-repetitive feedback is provided to make the interaction with the child optimal. This all while at the same time teaching the child effectively with varying levels of difficulty based on the child's current level of knowledge.
Planning
| Week | Activity | Name |
|---|---|---|
| 1 | Choose a subject | All |
| Literature research for problem statement and SotA | All | |
| 2 | Create interview questions | Nynke + Tom |
| Concept virtual learning platform | Emile | |
| 3 | Literature research for introduction and users | Bob + Teis |
| Continue creating interview questions | Nynke + Tom | |
| 4 | Research and write about robot Haru | Bob + Teis |
| Create app mock-up | Emile | |
| Prepare presentation | Nynke + Teis + Tom | |
| 5 | Interview elementary school teacher | Tom |
| Write scenario and impact | Teis | |
| Research robots and virtual learning platforms | Bob + Nynke | |
| Research gamification | Emile | |
| 6 | Create and distribute questionnaire about different robots | Bob |
| Work out interaction with robot in more detail | Nynke | |
| Write concept | Teis | |
| 7 | Interview elementary school teacher | Nynke |
| Writing about result of questionnaire | Bob | |
| Work on demo of virtual learning platform | Emile | |
| Create state-diagram | Teis | |
| 8 | Work on demo of virtual learning platform | Emile |
| Write about interviews | Tom | |
| Read and check wiki page | All | |
| Create script for video | Bob + Teis | |
| 9 | Work on demo of virtual learning platform | Emile |
| Make video of demo | Emile | |
| Record video presentation about project | Teis | |
| Assist in making of videos | Bob + Nynke + Tom |
Milestones
- Decide upon a subject.
- Write the introduction and the problem statement.
- Describe the users and their needs.
- Describe the approach.
- Search and read papers about the current state of the art.
- Make a summary of the papers about the current state of the art.
- Narrow down the scope of the project.
- Create interview scheme for teachers.
- Conduct the interviews with teachers.
- Make personas and scenarios to illustrate the value of the project.
- Start looking into ways to program the online learning platform and how to make virtual assistants.
- Start writing down the technical content in the report.
- Integrate the scenarios and personas into development of the learning platform.
- Work out, finalize, and refine the online learning platform, and make sure it can be displayed on an interface with a touchscreen.
- Create an online questionnaire to assess the likability of different robots.
- Let elementary school children fill out the questionnaire.
- Show the results of the questionnaire data in a graph.
- Create state diagrams for the interaction between robot and student.
- Make a video about the robot.
- Demonstrate the virtual learning platform in a demo.
- Complete the Wiki page.
Deliverables
- A complete and coherent Wiki page concerning the development of the online learning platform designed to teach feeble-minded students.
- A prototype of the virtual learning system that shows an explanation of, and an examination of fractions.
- A video about the study of how to design a study buddy that includes a demo of the virtual learning system.
Approach
In order to find out how the perfect study buddy system should be designed, we will perform a literature study about the needs of feeble-minded children in elementary school. Furthermore, elementary school teachers will be interviewed to assess to what extent the teachers believe the virtual study buddy system will be effective, and to find out what functions and characteristics the system should have in order to become effective. We will use this information to create several personas that represent the primary users. Based on these persona’s and additional literature, we come up with a digital learning platform that allows students to select from an array of topics the topic they need more help with. We will create only the part of this platform that will explain, elaborate on, and test the topic of fractions in primary school arithmetic.
Introduction
Since the introduction of the Dutch “Wet Passend Onderwijs” in 2014, elementary school children with physical or mental disabilities are stimulated to follow regular education as much as possible (“Scholen voor speciaal onderwijs bezwijken onder wachtlijsten,” 2019). However, according to Wim Ludeke of the Landelijk Expertisecentrum Speciaal Onderwijs (LESCO), the number of children applying for a custom form of education is increasing. The reason is that, as a result of the current lack of elementary school teachers (Traag, 2018), teachers of “regular schools” do not have the time and resources to support these children, and thus they are sent back to schools with extra support. In the Netherlands, there are approximately 2.2 million people considered to have low intellectual ability (“Prevalentie van verstandelijke beperking,” 2020), which means they have an IQ-score between 70 and 85 (Bexkens, Petry, Graas, & Huizinga, 2018). According to the CBS’ population counter (2019), the actual amount of Dutch inhabitants is 17,420,249. This means that about 12.5% of the Dutch inhabitants is considered feeble-minded, or less intellectually capable. In a letter to the Dutch Parliament, the minister for elementary and secondary school education wrote that primary school classes consist of 23.0 children, on average (Slob, 2019). Between the age of 4 and 11, there are about 35,000 children that get a special kind of education (“Speciaal basisonderwijs,” 2019). Furthermore, there are about 1,500,000 children in total that get primary education (“Ontwikkeling van het aantal leerlingen,” 2018). Taking these numbers into account, each class in regular primary education is bound to accommodate at least two children that are feeble-minded, on average. This means two children that require extra attention from their teacher during their education, attention which cannot be given to them in the current state of Dutch education.
Subject
A study buddy robot that helps elementary school children with a relatively low IQ understand and practice material taught in class better.
Problem statement
This introduces the problem that children with a need for special education in schools that provide regular education cannot receive an optimal tuition. The focus in this research will be on feeble-minded elementary school children. These children often experience difficulties with learning. For example, they often fail to understand a novel concept the first time it is explained in class, because of which they might need an extra, more elaborate explanation of the concept (Ahmad, Mubin, & Orlando, 2016). In circumstances like this, the teacher often lacks the time to provide this kind of extra tuition, but a robot providing a virtual learning platform in the class could repeat it as many times as necessary, and elaborate on the content as much as needed.
Objectives
The aim of our literature study is to define a robot that can act as a study buddy to help feeble-minded children in elementary school keep up with the pace of fellow students. Our goal is to develop a prototypical, virtual learning platform displayed on the robot’s interface that can repeat, elaborate on, and test topics of interest that feeble-minded children did not understand the first time a teacher explained it to them. By personalizing and adjusting the study buddy to its user, we aim to make the regular Dutch education more effective and accessible for elementary school children with an IQ between 70 and 85.
Users
Eventually the user group will consist of all scholars and/or students. For now, the focus is only primary school students of the Dutch 'group three until eight', those students are normally between 6 and 12 years old. Users that will use the digital learning platform the most and who the system is designed for, are scholars with low IQ.
Primary Users
The primary user in this report will be defined as the person that actually works and interacts with the study buddy robot. Therefore, the primary user will certainly be the somewhat less cognitively capable elementary school students that need some extra guidance during class. After the teacher is done explaining some new content, the robot will approach the student and briefly quizzes them on the topic just explained to see if they perform well enough to indicate they get the basic content of what was explained.
Furthermore, the teachers are considered to be a primary user, because they need to specify which topic was treated in class in order for the robot to approach the children with the right study material. So, the teacher also works with the study buddy first-hand in terms of setting up the robot’s study plan. Moreover, the teacher will keep track of the students’ progress after working with the study robot.
Secondary Users
Secondary users of the teaching robot are classified as people who may be indirectly influenced by the system in some way. In this case, where we assume a class in regular education with a relatively small amount of feeble-minded students that require a study buddy robot, the secondary user would be the classmates that are not assigned a study robot. An influence of a peer’s study robot on classmates might be a disruption of classmates’ concentration due to movements made by the robot during one of its interactions with the student, or simply due to distracting images on the robot’s interface.
Requirements
The robot study buddy shall:
- have a touchscreen as an interface to communicate the content of the class with the student.
- be able to express emotion through its screens and limited movements.
- understand the emotional state of the student and communicate accordingly.
- be able to keep track of the progress of the user.
- have a kind, anthropomorphic exterior.
- be able to address the pupils in class appropriately.
- motivate feeble-minded children to study newly taught material.
- be able to give the same hints and support in different ways to prevent repetition.
- be able to make students feel at ease by having funny and entertaining conversations.
- have gamification elements
Robotic Basis
Haru

The image on the right shows the desktop robot Haru, designed to be a social companion robot for people of any age. In designing Haru, empathy was a key consideration, it can signal emotion through body movements and visual elements such as eyes and color (Gomez, Szapiro, Galindo, & Nakamura, 2018). In the future, it will be able to recognize persons and their facial affect to improve empathic interaction. The Haru robot can therefore interact with people appropriately due to the incorporation of current emotions in the interaction, which allows for communication according to the emotional state of the person it interacts with. To signal a feeling of proper understanding, the robot should be able to express a wide range of emotions. This range is visualized in the figure below:

Because of the robot’s anthropomorphic shape, it can facilitate human-robot interaction, because it “incorporates the underlying principles and expectations people use in social settings in order to fine-tune the social robot’s interaction with humans” (Duffy, 2003).
However, Haru does not have a voice yet (Aylett, Sutton, & Vazquez-Alvarez, 2019).This means a robot like this is purely useful for showing information on its screens that does not require additional sound, such as chapters from a book. If Haru would be used for the implementation of the study buddy, we would have to record voices ourselves. In the study of Fischer, Niebuhr, Langedijk and Eisenberger (2019), different voices are compared over different robots. They did include Haru to their research as well and found out that for Haru the best voice has a melodic dominance compared to a physical dominance. Fischer, et al. describe physical dominance as a result of different vocal tract sizes in humans, the melodic dominance is explained as difference in pitch. Fischer, et al. propose to research the fact that Haru has no arms and the relation of it to speech perception. Furthermore, Haru is a desktop robot, so it would not be able to approach people, as we aspire to achieve with the study buddy.
To prevent that other students in the same classroom get distracted by the sounds produced by the robot, it is recommended to use headphones that can be plugged into the study buddy. Since headphones are often used for computers or laptops at elementary schools, this will not create additional costs.
Haru would be a useful foundation for our study buddy, because it is so much focused on empathy, and recognizing and signaling emotion. If it were to approach children in class, the robot needs to do so keeping in mind it is interacting with children that require a unique, individual approach. Furthermore, the two interfaces Haru possesses to display its eyes can be used to display the virtual learning platform on, so no external interfaces are required.
NAO by Softbank Robotics


NAO is a robot, created by Softbank Robotics (2018). The first version was developed in 2006, the most recent version was developed in 2018 and is the sixth. NAO is a robot, 58 centimeters tall. It is a human-like robot which means it has arms, legs, a body, and a head. NAO has rounded features which are described by Softbank Robotics as ‘pleasantly rounded’. These rounded shapes contribute to the anthropomorphic evaluation of NAO. Besides, on the website of Softbank Robotics, six features of NAO are presented too shortly summarize the possibilities of NAO:
- 25 degrees of freedom which enable him to move and adapt to his environment
- 7 touch sensors located on the head, hands, and feet, sonars and an inertial unit, to perceive his environment and locate himself in space
- 4 directional microphones and speakers to interact with humans
- Speech recognition and dialogue available in 20 languages
- Two 2D cameras to recognize shapes, objects, and even people
- Open and fully programmable platform
This robot thus has a wide range of abilities. It can also talk, give its eyes different colors to signal emotion, and use its anthropomorphic shape to make it feel connected with people. However, NAO does not have a built-in touch screen interface on which we would like to project the online learning platform to help children study, which means an external tablet would be required in addition to NAO. Therefore, the use of NAO would be a cumbersome way to teach feeble-minded children in the class, because the robot is solely used to interact with the children and to motivate them; purposes that Haru can fulfill, too.
Likability and Reliability
The appearance of a robot can be an important factor in making a robot a good study buddy. In their research, Song, Zhang, Barakova, Ham, and Markopoulos (2020), investigate the influence of speech and different appearances. Song, et al. (2020) ascribe different social cues to one of two types of robotic roles: an evaluative role and a non-evaluative role. As Song, et al. (2020) already state: "facial expression can affect the HRI process and task performance". Therefore, we should take facial expressions into account as well. One of the findings of Song, et al. (2020) is that children became significantly more nervous from the robot carrying out the evaluative role. Making the robot behave non-evaluative can thus help the interaction between the study buddy and the feeble-minded children. Within the non-evaluative role, the robot's facial expression is positive and funny. Moreover, the bodily appearance looks informal. The speech is quick, active, indirect and less forceful. To combine all the non-evaluative terms mentioned into one property, one comes to likability. According to the American heritage dictionary, being likable is defined as being found pleasant or attractive and evoking empathic or sympathetic feelings. Another important characteristic of the robotic study buddy is reliability. The children have to interact with the robot and learn from it. This interaction already asks for a reliable appearance but in addition, the children can also build an emotional bond with the robot, which requires trustworthy behavior and therefore a reliable appearance as well.
In conclusion, likability and reliability are two measurable aspects that can summarize the non-evaluative role and determine the trustworthiness of the robot. When both aspects are characteristics of the study buddy it can enhance the HRI. The students have to like the robot because it will be their buddy in school. Besides, learning from the robot should be fun in order to motivate the children, likability can contribute to this process. Moreover, the children are learning from the robot which indicates the importance of reliability.
Questionnaire
Both characteristics are measured via a questionnaire which asked children of our user group to evaluate the likability and reliability of different robots (Haru and NAO). The robots were showed in the questionnaire by a picture. In order to gain more insights into the likability and reliability of different robots, we decided to add two other robots to the questionnaire as well. By adding more robots we can determine better how likable and reliable Haru and NAO are in comparison to other robots. The other two robots added are Tega and iCat, both can be seen in the pictures below.


The questionnaire can be accessed via this link: https://forms.gle/LaM3a92fc291RqXo8. The first question asks for the participant's consent to contribute to our research. A section asking for demographics is followed, age and school class are asked. The questionnaire then starts with the research. The four different robots are shown, followed by the same two questions for each. The first question asks for the likability of the shown robot, the second question asks how much the participant would trust the robot. The second question asks not directly for the reliability since it can be possible that not all participants know the meaning of reliability, due to the young age of our user group. All questions are asked in Dutch since all participants are Dutch and they probably do not understand English yet.
Results
The questions are answered on a 0-to-5 likert scale. This scale is converted to a (-5)-to-5 likert scale by multiplying all answers by two and subtracting 5. By converting the scale we obtained the value zero for neutrality, positive integers are related to likability and reliability while negative integers represent dislikability and non-reliability.
The sample size N, consisted of 16 participants. The average age is 11 years old, the distribution over classes is: group 4 (1x), 5 (1x), 6 (2x), 7(2x), 8 (10x). The results can be seen in the graph below. As you can see, all robots score positive on both likability and reliability. Haru and NAO score the highest on both.
| Robot | Likability | Reliability |
|---|---|---|
| NAO | 3.8 | 3.3 |
| iCat | 1.4 | 0.7 |
| Haru | 3.1 | 2.6 |
| Tega | 2.6 | 1.8 |

Conclusion
Based on the results of this questionnaire all four robots score positive on likability and reliability and should thus be considered as options for our study buddy. Of course, choosing the robot with the best results is desired. However, many more aspects are involved in determining a good study buddy. For instance, taking this research into account we should use NAO as our study buddy since NAO scores highest on both likability (3.8) and reliability (3.3). However, Haru scores high as well (3.1 and 2.6) and has some advantages over NAO in the fields we want to use the robot. Haru namely has two screens as eyes, on those screens, it is possible to show study material.
Gamification & Learning Platform
In order for the learning platform displayed by the robot to be effective and motivating for children, the platform’s interface and method of learning require much thought. As we are dealing with children, we argue that this can best be achieved by making a game out of learning. Gamification is the implementation of game elements and game-like thinking within another field not related to games, usually as a motivating purpose (Kiryakova et al., 2014). Gamifying usually means adding game elements to that specific field, including:
- levels, or a progression system that motivates the user to continue further.
- points, usually in repeatable tasks that require a score, to motivate the user to repeat a task multiple times and get a better score.
- badges, or any other form of reward and achievement, to keep the user invested and have it come back or strive for better rewards or achievements.
- rankings, to see how well the user is doing compared to others.
- challenges, to make the user try harder than usual and work towards a defined goal.
Learning objectives have to be clearly defined, and the platform should be carefully thought out to be tailored to its user base, in our case elementary school students with educational deficiencies. Along with this, the platform should allow for multiple performances, which means the option to repeat an action; the exercises should be achievable by the user; the system should allow for gradually more difficult options/tasks; and there should be multiple paths to achieve a goal. According to Stott and Neustaedter (2013), when designing a learning platform based on gamification, it should be noted that some underlying dynamics and concepts are more important than others. Four of these aspects that are considered to be more successful than others include:
- freedom to fail, to focus more on the learning process rather than the results, as “failure” is often seen as discouraging and does not encourage risk taking and experimenting
- rapid feedback, of the positive kind, that can be made through self-paced feedback (hint buttons and asking for available help when necessary), visual cues, progress bars, etc.
- progression, in the form of levels or missions, interest curve, grab attention at the right moments
- storytelling, to keep the user engaged and have it come back, and having a unifying story keeps the user engaged and allows for a flow of increasing content, story does not need to be complicated and can be set in the real world
In our situation, we should avoid rankings and leaderboards in game inspired design, as not all children thrive on competition; there are also children that feel pressured by competition, which means the competitive spirit of that element might not be healthy in an educationally challenged environment (Cole, 2008). However, every other aspect listed above can without a doubt be put to good use, and maybe even motivate regular students to use the platform themselves. Challenges are on a thin line, however, as the point of the platform is not to discourage the student by having exercises that are too complicated. However, the option should be made available, and might even be within an unlockable context, to not make the experience of the platform too simple once the student has learned the material.
Something that has not been mentioned in either papers but is often found in video games is personalisation. Having the option to change the aspect of the the platform to your liking, such as choosing and customizing avatars; changing background background colors; and altering text fonts can be a good way to keep the user invested in the experience by having a personal environment. To connect this with the recommendations for rewards in online learning platforms given by Kiryakova et al. (2014), the option to personalize the platform could be unlocked by gaining points for participating in lessons. This would mean completing a lesson would yield a number of points or credits that the user can spend on personalizing their account.
Interview
During the project interviews were setup with primary school teachers to assess to what extent the teachers believe the virtual study buddy system will be effective, and to find out what functions and characteristics the system should have in order to become effective. It was also in our interest to research what current education method is in use and how teachers experience learning problems with children. The reason why we did not interview students in elementary schools, is that the questions we wanted to ask might be too complex or difficult to answer for them. Moreover, teachers often have enough experience to know where things go wrong and what is difficult for children.
An interview scheme was set up such that each interview could be compared. The topics for the interview were the use of online learning platforms, current teaching method, children with learning difficulties, introducing our study buddy and last some demographics of the class. The interview scheme can be found here: https://docs.google.com/document/d/1RRnaZnAvJ2KOiTEh2_49PJk_FAY4AGe97klJp2Q5WiA/edit?usp=sharing. The interviews were performed in Dutch since the teachers all spoke Dutch and it did not make sense to us, since their jargon is also in Dutch. The informed consent of the interview and the transcribed versions of the interviews can be found in the appendix.
The main findings of the interviews were:
- Teachers already use an interactive whiteboard. They use the interactive whiteboard to play games and show videos which has a positive effect on the children. This positive effect can be seen in higher participation and that the use of videos is more based on an individual level. Furthermore it is addressed that children need a considerable amount of time to learn how to work with a certain learning platform on a computer or laptop.
- To check whether the children understood the material, the teacher asks questions and uses the interactive whiteboard to check the progress. It also became clear that children have difficulty with admitting that they have difficulty with understanding a certain topic. The children then will use avoidance behavior such as laughing about it or be annoying. Some children will go quiet and then it is hard to see whether they understood it since it looks like everybody understands it.
- The attention of the teacher is not evenly spread across the children, due to children with learning difficulties or other problems, for example behavioral probelems (such as ADHD). It costs the teacher a lot of energy to support these children, at the expense of the other children. Therefore the class can not learn optimal due to less attention from the teacher. The teachers also express that this problem is very hard to solve with a large class of 25 children.
- The teachers were enthusiastic about the study buddy, because the study buddy can personalize the learning experience per child. This is needed since every child is different and it is always good to learn material from a different perspective. A few tips from the teachers were that the study buddy should not be too childish and should have some humor to motivate the children.
- Nowadays low IQ children stick to normal primary school, which causes the quality of primary schools to drop due to not equally divided attention of the teacher as announced earlier.
These findings are implemented in the report and are also used to make personas and scenarios.
Concept
The main idea of the robot is that it has a screen on which it can display the online learning platform we are developing, and that it is mobile enough to approach children in class. The robot will approach the kids, because children might fear situations in which they face criticism or in which they feel they might make themselves look ridiculous to others, which is a very prevalent social anxiety children have to deal with (Möller & Bögels, 2017). This might result in the fact that our target students might be less inclined to let the teacher (or the robot, for that matter) know they did not understand a concept out of fear of feeling criticized. Moreover, a positive relation is found between intrinsic motivation and academic achievement in young children (Broussard & Garrison, 2004). This implies that our target group—low-IQ children—is expected to have less motivation to study and improve at school. The figure below shows a persona based on literature and the results from the interviews.

Anna Smith is such a feeble-minded student with an IQ of 75 who lacks motivation and fears criticism. She needs a customized way of teaching that is adapted to her slower pace, but the teacher cannot provide such personalized education to every student. She is also unable to go to a school for special education, because of the limited capacity at such schools. The study buddy is a great solution for Anna to be able to remain at her current school and still get customized education. From Anna, and countless kids like her, it is derived that the robot must be able to generate motivation in children to make them eager to study with the robot. An anthropomorphic shape of the robot is necessary to achieve this, because—in individual training, as is the case with our target group—a human-like appearance further encourages users to interact with the machine, which allows for more training opportunities than would have been available in the case of a non-anthropomorphic robot (Złotowski et al., (2014)). Furthermore, integrating the topic of gamification, adding game-like elements to the study platform is most likely to generate an increase in children’s motivation to study. This could be achieved by creating an environment where points can be rewarded for certain achievements. These points could then be spent personalizing the platform, unlocking special games, or buying hints. In short, what makes this robot unique and innovating is that it tackles obstacles children often experience, such as a lack of motivation, and the feeling of being criticized; and by integrating gamification, the study buddy addresses the main interestest of children in this online era.
Suitable robot
The robot that is chosen as the basis for this project is Haru. This choice is partly based on the positive results Haru got on the likability-reliability questionnaire that was spread among elementary school children. Moreover, it is based on the fact that this robot satisfies the requirements of having an interactive interface that can be used to display the learning platform; and an anthropomorphic shape which allows for a motivating connection between Haru and the children. Furthermore, the aim for Haru was to build a personal robot that people would really love and feel connected to (Ackerman, 2018), which can make learning for these children more fun and effective and generate the intrinsic motivation feeble-minded children require to start studying with the robot. However, Haru lacks the mobility to approach children in the class, an ability NAO does possess, so until future developments on Haru are established to make it mobile, Haru can only be used as a desktop robot in class that should be on the tables of the less cognitively capable students.
In order for the robot to address the student, it will need to be able to draw their attention appropriately. According to Torta (2014), the most common interaction cues in joint attention are gazing movements and pointing gestures. Waving to get attention is generally considered to be more pleasant and friendly than making eye contact, and it is processed faster than blinking. However, since Haru does not have any arms at its disposal, its physical shape does not allow it to wave. On the other hand, Haru is able to display a pair of hands on its screens, and it can rotate its screens, thus implying a waving gesture. It should be noted that just looking at a person might be considered not very friendly, according to Torta (2014). As a result, a simulated waving gesture combined with an auditory cue is the most appropriate way of drawing the user's attention. Such a cue should therefore be integrated, such as the robot saying “Hello” to draw attention.
However, the requisite of attention is not merely involved in the attention-drawing process before the tutoring starts. It is also important to maintain the child's attention during the tutoring session. Children are expected to accept help from a robot and listen to it; an exception that cannot be taken for granted. One thing that is to the robot's advantage is the finding by Mwangi et al. (2017) that a robot's gaze attracts more attention than a human gaze, a finding most likely related to a natural curiosity toward and attractiveness of a robot. This is an asset we can put to use here by implementing the feature that the robot tracks eye movements of the child, and if it notices the child has not been watching either screen for a minute, it uses his "eyes" on his screens to try to make eye contact with the student in order to keep his attention. For that matter, to prevent a drop of attention, the robot should create intermezzos between his teaching sessions in which it makes eye contact, followed by an informal interaction to keep the student interested and motivated. From the interviews we conducted with several teachers, it became clear elementary school children are especially attracted to visual cues, such as videos, so such an informal interaction could be that the robot plays a short, funny video to keep the lessons varying. Another way of keeping children's attention to the tutoring session is to use non-repetitive and detailed feedback (Song et al., 2020). They also argue that children mostly pay attention when a robot makes noise or talks. Taking this into account, feedback after exercises should come in different forms and modalities. The first time, a success should be indicated by displaying a big green checkmark; the second time it should be indicated by playing a euphoric sound; and another time by displaying an increase in credit points. Furthermore, it is important that the robot keeps talking during its explanations to keep the attention instead of just displaying the information.
Face or voice recognition
In order to make it possible for every student to have a private account, and to track their gaze for attention-related purposes, it is important to include face and voice recognition. Since the children are feeble-minded, they may have difficulties in remembering a password, so they could log in with their facial identity. Besides, filling in your ID and password every time Haru is used would take a lot of unnecessary steps. Therefore, a face or voice recognition can be a reasonable addition to the Haru assistant. Whether face or voice recognition is better or more convenient to use, depends on the camera and microphone Haru is equiped with.
Online learning platform
McGuire et al. (2017) found that students in “group 8” of elementary school perform better on exercises about fractions when they receive text-based or image-based feedback compared to correctness-only feedback. However, this difference was not significant. Moreover, they found that students who received image-based feedback were less likely to complete the problem set than those receiving text-based or correctness-only feedback. This finding was very significant. The results of Kaminski & Sloutsky (2020) suggest that for initial instruction on a new or recently introduced elementary mathematical concept, contextualized student-made material should be avoided or used with caution, particularly with young children. They found that students who use simple, pre-made circles scored higher than those who used the colorful, contextualized student-constructed pizzas on pre-instruction tests of basic fraction knowledge, immediate tests of learning, and delayed tests of transfer. So, to make learning more fun, we could use colorful images in the exercises, but only in a later stage. It is important that children first understand the new concept and simple shapes are more efficient for that.
In a study by Calvert et al. (1989) involving children from “group 4” and younger, they found that children find it more fun to learn with moving objects compared to stationary objects on a computer screen. Moreover, recall of the moving objects was better than for the stationary objects. The researchers think that action assists children’s memory because it supplies an additional visual mode of representation that supplements the verbal names of objects. So, to make learning with the study buddy more fun, we could use little animations in the explanations given by the robot. We could also make the objects and shapes used in the exercises move a little, but only before or after the user is trying to solve the exercise. Otherwise, the student might be unable to focus. Because moving objects improve recall, after some practice, it might become easier for students to name the fractions corresponding to parts of different shapes.
In addition, the interviews we conducted with elementary school teachers showed that it is often underestimated how much time it takes for children to be able to handle new technologies. Children need to get acquainted with the program before they can confidently use computers. In the context of the virtual learning platform, we thus cannot expect children to be able to understand and work with just any composition of the platform. It will have to be fun to interact with, but plain and simple at the same time to make it easy for children to understand how it works. This entails few buttons on a screen, not too much information at once, and an obvious flow of information.
Scenario with study buddy
The scenario in the figure below is composed of information gathered from interviews with teachers, literature research on motivation of children and on how to maintain children's attention.

This scenario is displayed in detail in state diagrams. The first diagram shows how attention of the child is drawn; this one can be found here: Media:draw_attention.png. The second shows how a lesson on the platform goes and is displayed below.
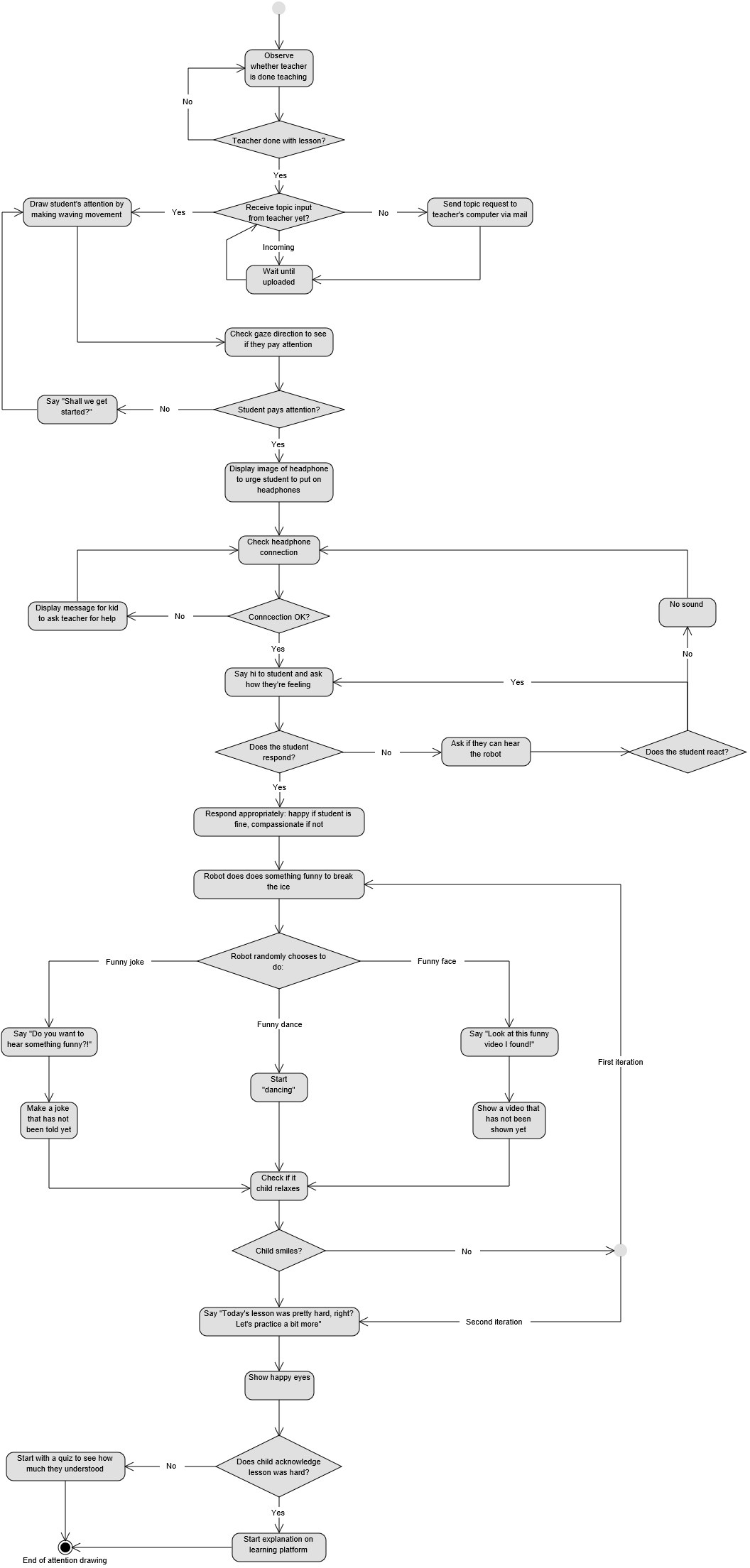{kind=link}

To be able to motivate students and keep their attention, the robot starts with an informal conversation and by telling a joke or showing a funny video. Then, the robot sympathizes with the student by saying the content just explained was really difficult, and tells them not to worry, because they are going to practice together now. To make sure the student keeps paying attention one day after another, the robot must make sure not to be repetitive. That is, similar outcomes should be brought in different words, which is illustrated in the scenario with different words for "well done". From the interviews, we took into account that students are mostly appealed to visual cues, so videos are used to keep students motivated and attended to the explanation. Furthermore, teachers recommended we add humor into the teaching session, because humor is generally an aspect kids love. Moreover, the interviews showed teachers would like to be kept up to date about the progress that students with the study buddy make. Therefore, a brief overview of the lesson and quiz performance of the child will be sent to the teacher after the session with the study buddy. As for the gamification literature, we included a game-like platform where lessons are taught as "games" which yield points that can be used to personalize the study buddy and the learning platform. For example, the child can change the robot's name, and it can choose different backgrounds, themes, and voices of the learning platform. In short, most of the requisites proposed in this whole section are integrated in this one scenario, illustrating how a lesson with the robot will go.
Impact
Impact on low-IQ children
The absolute primary user of the study buddy will be the elementary school kid with a low IQ (between 70 and 85) that takes classes in regular Dutch education. It is important that the robot properly interacts with the children to keep them interested, and that children feel comfortable around the robot. This starts with proper acceptance of the robot by children. According to Westlund et al. (2016), if the study buddy is introduced to children as being a machine, a larger robot-child distance might be created, which makes the student feel less comfortable around it. Therefore, children will be told they are going to get a study buddy, rather than a study buddy robot. Furthermore, Vogt et al. (2017) argue that when a student has their first encounter with the study buddy, it might be scared by its sudden movements. As per their advice, children should be familiarized with the robot before its implementation, for example by sending them coloring pictures of Haru, and by having them watch videos of the robot. If an initial feeling of comfort around the robot is established, the study buddy still needs to keep the children interested when it interacts with them. To achieve this, the robot should not start with serious tutoring immediately. After drawing the child’s attention, Haru should tell a joke; make use of its flexible posture to make funny movements; or make use of its eyes to do funny faces. This, in addition to game-like elements introduced based on the topic of gamification, should make the interaction with the robot educational, but above all entertaining.
In classes of 23 children, on average (Slob, 2019), it is hard for the teacher to find a teaching pace that works for everyone. Children that are a somewhat less cognitively capable are most likely to fall behind in this case, and that is where our robot comes into the picture. What makes the study buddy unique, is that instead of expecting a child to report they do not understand something, the robot approaches them to practice some material some more and to check whether they understood some new concept. This should help the student overcome the mental threshold created by the subjective feeling making themselves look ridiculous to others if they show they do not understand something (Möller & Bögels, 2017). Furthermore, the robot should motivate the student to practice by creating a bond with the student, using its anthropomorphic form and “emotions”. Interacting with the studdy buddy should be so much fun for the student, that it is considered as intrinsically motivating. Moreover, feeble-minded children have more difficulties with achieving good academic results and thus, based on (Broussard & Garrison, 2004), these children are less motivated to study themselves.
If the study buddy were to be implemented on a large scale, and each feeble-minded child in regular education was to get one, each of these children could get a personalized education that is adapted to their tempo. Depending on the results of the small quiz in the beginning, the learning platform chooses how elaborate the explanation should be, and which specific subtopics need more attention.
Impact on teachers
For the teacher, the impact of the robot will also be quite substantial. For the robot to know which concept is being discussed in class, and thus for the robot to be able to approach the student, the teacher needs to report what they are going to discuss in class every day. This means the teacher will have to fit an extra task in their already-tight schedule. However, the teacher is expected to spare time that is now spent re-explaining subject matter to students that do not understand the material. The teacher will have to adapt their way of teaching in its entirety, in that they must trust a robot to take over part of their job. In one of the interviews with elementary school teachers, when the teacher was asked if she was open to using the studdy buddy in her class, she responded very positive. However, there was an important requirement the robot would have to meet, namely user-friendliness. She said: "Ja, ik zou dat wel leuk vinden. Ik zou dat wel willen proberen. Maar het moet wel een beetje gebruiksvriendelijk zijn. Dus als ie continu vastloopt en ik moet continu ernaar toe om te helpen, dan ben ik daar heel snel klaar mee. Dat komt omdat ik 25 kinderen heb. Dus het moet wel zo’n programma zijn dat ik het de slimme kinderen, de kinderen die handig zijn met de computer, makkelijk kan leren en als die het eenmaal kunnen, dat ze dan stapje voor stapje andere kinderen begeleiden." What can be learned from this is that before the implementation of the study buddy in actual classrooms, user studies should be performed to evaluate and improve the interaction between the robot and the students and teachers.
Not every teacher might be as open to this kind of innovation in education. Hauk et al. (2018) showed that there is a negative relation between age and perceived usefulness, intention to use a technology, and perceived ease of use. This implies that older teachers might be less supportive of the idea of having a robot in their class, which could be conflicting.
State of the Art
In this section, research is done to investigate what is already known about (robotic) study buddies. Twenty-five articles are found, each article is shortly described to end up with an overview about different studies on study buddies. The list containing all articles is summarized in table 1.
Table: Summary of SotA
| SotA list number | Robotic or human | Friend, study buddy or teacher | Method | Result |
|---|---|---|---|---|
| 1 | Robot | Teacher | Teach while gaming | Positive |
| 2 | Robot | Teacher | Robot performs behaviour to influence learning | Positive |
| 3 | Human | Study buddy | Peer mentoring | Positive |
| 4 | Robot | Friend | Let children co-design | Positive |
| 5 | Robot | Teacher | Lecture by a robot | Neutral |
| 6 | Robot | Study buddy | Interaction in classroom | Positive, especially two-way interaction |
| 7 | Robot | Study buddy | Motivating and rewarding | Positive |
| 8 | Robot | Study buddy | Help children reading | Positive |
| 9 | Human | Teacher | Storytelling as constructive educational activity | Positive |
| 10 | Robot | Friend | Compare (non-) adaptive robots for children | Positive for adapting robots |
| 11 | Robot | Friend | Play games to learn English | Positive |
| 12 | Robot | Study buddy or friend | Survey | Positive (but not as a teacher) |
| 13 | Robot | Friend | Playing chess | Positive |
| 14 | Robot | Study buddy (as tutor) | Giving advice | Positive |
| 15 | Robot | Study buddy (as tutor) | Giving advice while solving a puzzle | Positive |
| 16 | Robot | Friend | Assist cancer patients | Positive |
| 17 | Robot and Human | Friend | Interact with both | Positive if first interacting with robot |
| 18 | Robot | Friend | Playing games together or alone | Positive (children prefer playing with iCat) |
| 19 | Robot and Human | Study buddy | Build a LEGO construction, with human help or robotic help | Neutral. Human help -> more questions. Robotic help -> more eager to do well |
| 20 | Robot | Study buddy | Portable learning centers for during the weekend | Positive |
| 21 | Robot + avatar | Study buddy | Help diabetes self-management for children | Positive, especially if they perceived robot and avatar as the same agent |
| 22 | Human | Study buddy | Compare two groups, with/without | Positive, higher scores with study buddy |
| 23 | Robot | Teacher | Give a science lecture | Positive |
| 24 | Robot | Friend | Rehabilitate autistic children | Positive |
| 25 | Robot | Friend | Let autistic children play and interact with robot | Positive |
1. Ahmad, M. I., Mubin, O., Shahid, S., & Orlando, J. (2017). Emotion and memory model for a robotic tutor in a learning environment.
- A robot tried to teach children vocabulary, while the children were playing snake. The robot was either giving positive, negative or neutral feedback. The result of the positive feedback had a significant effect compared to the other two in addition the robots helped to learn the children learn vocabulary.
2. Ahmad, M. I., Mubin, O., & Orlando, J. (2016). Understanding behaviours and roles for social and adaptive robots in education: Teacher’s perspective.
- The purpose of this study is to not only understand teacher's opinion on the existing effective social behaviours and roles but also to understand novel behaviours that can positively influence children performance in a language learning setting.
3. Andrews, J. and Clark, R. (2011). Peer mentoring works! Birmingham: Aston University.
- This report draws on the findings of a three year study into peer mentoring conducted at 6 Higher Education Institutions (HEIs). The research findings provide empirical evidence that peer mentoring works.
4. Arnold, L., Lee, K.J., & Yip, J.C. (2016) Co-designing with children: An approach to social robot design.
- The study let children co-design during their process of making a Friend Robot. It turns out that including children in the design process is a way to gain unique insights. Several of the children said that they would want their friend robot to be small and portable.
5. Edwards, A; Edwards, C; Spence, P; Harris, C; Gambino, A (2016), Robots in the classroom: Differences in students’ perceptions of credibility and learning between “teacher as robot” and “robot as teacher”.
- College students rated the credibility of a teleoperated robot and an autonomous social robot acting as a teacher for the same lecture. Results showed that while the teleoperated robot was considered more credible, the overall teaching was of the same level and students are willing to follow lectures of autonomous robots.
6. E.Hyun ; H.Yoon ; S. Son (2010) Relationships between user experiences and children's perceptions of the education robot.
- To help with better studying, the robot should be placed/interacted with in a classroom rather than a hallway or office. The results were better when there was a two-way interaction, which means using the touchscreen and listening to the robot's voice.
7. Fachantidis, N., Dimitriou, A. G., Pliasa, S., Dagdilelis, V., Pnevmatikos, D., Perlantidis, P., & Papadimitriou, A. (2017). Android OS mobile technologies meets robotics for expandable, exchangeable, reconfigurable, educational, STEM-enhancing, socializing robot.
- A socially assistive robot is being constructed to represent a companion of the student, motivating and rewarding him. The paper addresses existing prior-art and how an android OS smartphone will address the design requirements.
8. Feil-Seifer, D., & Matarić, M. J. (2011). Socially assistive robotics. IEEE Robotics & Automation Magazine, 18(1), 24-31.
- The paper aims to probe the need of an assistive robot that makes reading process less challenging.
9. Fridin, M. (2014). Storytelling by a kindergarten social assistive robot: A tool for constructive learning in preschool education. Computers & education, 70, 53-64.
- The experiment in this paper was designed to examine how KindSAR(Kindergarten social staff) can be used to engage preschool children in constructive learning, the basic principe of constructivist eductaion is that learning occurs when the learner is actively involved in a process of knowledge construction.
10. Janssen, J.B., van der Wal, C.C., Neerincx, M. (2016). Motivate to learn: Effects of performance adaptation on child motivation of robot interaction
- Long-term interaction between children and robots requires the child to have a bond with the robot. Specifically for children with diabetes, robot interaction could be a valuable addition as support for their daily struggles. Results from the free-choice period showed that motivation of children that interacted with the adaptive robot was significantly higher compared to the non-adaptive robot.
11. Kim, Y., Smith, D., Kim, N., & Chen, T. (2014). Playing with a Robot to Learn English Vocabulary
- Through multiple observations of child-robot play in situ, it was noted that children easily learned how to interact with the robot and showed sustained interest and engagement in the curricular activities with the robot
12. Lee E.K., & Lee Y.J. (2008). Elementary and Middle School Teachers’, Students’ and Parents’ Perception of Robot-Aided Education in Korea.
- In Korea, robot-aided education has been studied. It was shown that robot-aided education was friendlier than other media-assisted education and enhanced children’s motivation. The perceptions and needs of intelligent educational service robot among teachers, students and parents in Korea were surveyed. In this study, it was found that they have a positive perception of the use of robots in schools. However, they do not want to use the robot as a teacher.
13. Leite, I., Pereira, A., Castellano, G., Mascarenhas, S., Martinho, C., & Paiva, A. (2011, June). Social robots in learning environments: a case study of an empathic chess companion.
- For the system used in this paper a multimodal system for predicting and modeling some of the children’s affective states is currently being trained using a corpus. With this model a personalised learning experience by adapting the robot’s empathy to the needs of the child is modeled.
14. Leyzberg, D; Spaulding, S ; Scassellati, B (2014), Personalizing Robot Tutors to Individuals’ Learning Differences, in 2014 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI)
- A robot tutor gives either general or personalized advice. The study shows that there is a one-sigma increase in results with personalized advice, signifying that the personalized advice of the robot can give results no matter how small.
15. Leyzberg, D; Spaulding, S ; Scassellati, B; Toneva, M (2012); The Physical Presence of a Robot Tutor Increases Cognitive Learning Gains, Department of Computer Science, Yale University
- 100 students were tasked to solve a series of puzzles, with robot tutors giving varying degrees and methods of advice. Results showed that the group of students with the physical presence of the robot giving personalized advice were the better group.
16. Meghdari, A., Shariati, A., Alemi, M., Vossoughi, G. R., Eydi, A., Ahmadi, E., Tahami, R. (2018). Arash: A social robot buddy to support children with cancer in a hospital environment.
- The social robot Arash is for educational and therapeutic involvement in a pediatric hospital to entertain, assist and educate cancer patients. Two experiments were done to evaluate the acceptance and involvement of the robot, the obtained results confirm high engagement and interest of pediatric cancer patients with the constructed robot.
17. Robins, B.; Dautenhahn, K; Te Boekhorst, R. & Billard, A. (2005); Robotic assistants in therapy and education of children with autism: can a small humanoid robot help encourage social interaction skills? In Universal Access in the Information Society
- This study let children with autism interact with both robots and humans. Results showed that, after first interacting with robots, their social skills were better when interacting with humans.
18. Shahid, S., Krahmer, E., & Swerts, M. (2014). Child–robot interaction across cultures: How does playing a game with a social robot compare to playing a game alone or with a friend?
- This study let children interact with social robots. The children played games with iCat, it turns out that the children prefer playing with iCat above playing alone. However, the children do even more prefer playing with friends.
19. Serholt, S; Basedow, C; Barendregt, W; Obaid, M (2014), Comparing a humanoid tutor to a human tutor delivering an instructional task to children
- The study compares two groups of children creating a LEGO construction, one with a human instructor and one with a robot instructor. The results show equal performance, but different attitudes: children ask more questions to the human tutor, but are more eager to do well with the robot tutor.
20. Stephens, H., & Jairrels, V. (2003). Weekend Study Buddies: Using Portable Learning Centers.
- The use of the study buddy may encourage parents to be more involved and if the children enjoy the study buddy at school it may extend that enjoyment at home.The student buddy may serve as an additional tool for individualizing instruction and enhancing the achievement for all students.
21. Sinoo, C., van der Pal, S., Blanson Henkemans, O.A, Keizer, A., Bierman, B.P.B., Looije, R. & Neerincx, M.A. (2018). Friendship with a robot: Children’s perception of similarity between a robot’s physical and virtual embodiment that supports diabetes self-management.
- The PAL project develops a conversational agent with a physical (robot) and virtual (avatar) embodiment to support diabetes self-management of children ubiquitously. Their conclusions are that children felt stronger friendship towards the physical robot than towards the avatar. The more children perceived the robot and its avatar as the same agency, the stronger their friendship with the avatar was. The stronger their friendship with the avatar, the more they were motivated to play with the app and the higher the app scored on usability.
22. Thalluri, J., O'Flaherty, J.A., & Shepherd, P.L., (2014). Classmate peer-coaching: "A Study Buddy Support scheme".
- The study investigated the effects of a human study buddy. The students with a study buddy scored higher on a test compared to the ones without.
23. Verner, I; Polishuk, A; Krayner, N (2016), Science Class with RoboThespian: Using a Robot Teacher to Make Science Fun and Engage Students, in IEEE Robotics & Automation Magazine (Volume: 23, Issue: 2, June 2016)
- the humanoid robot RoboThespian gives a science lecture to children from grades 5-7 in two different environments, to check the perception of the robot by the children. The results are positive, and the educational goals attained.
24. Werry, I. Dautenhahn, K. (1999) Applying Mobile Robot Technology to the Rehabilitation of Autistic children.
- The paper discusses the background and major motivations which are driving the AuRoRA--(Autonomous Robotic platform as a Remedial tool for children with Autism) research project.In conclusion, robots can make a valid contribution in the process of rehabilitation and have the potential to make a contribution in the area of autism.
25. Werry, I., Dautenhahn, K., Harwin, W. (2001) Investigating a Robot as a Therapy Partner for Children with Autism.
- The AuRoRA project is investigating the possibility of using a robotic platform as a therapy aid for children with autism. The results thus far are encouraging in that they indicate that the children not only enjoy interacting and playing with the robot at various levels, but that they focus attention on the robot for longer than the toy truck. The children seem able to form very simple bonds with the robot and even to understand the basic interactions involved.
Conclusion
The goal of our project was to design a study buddy for feeble-minded children in elementary school, so that these children can keep up with the pace of their fellow students. We started by researching the state of the art of robots and learning platforms in education. Because we learned in the previous course of this USE track that the user is very important in the design of a system, we interviewed two elementary school teachers about their teaching methods and their experience with technical learning systems and learning difficulties. Moreover, we received feedback from the teachers on our concept of the study buddy. In addition, we got some great tips for the design of the study buddy. We asked children in elementary school to fill out a short questionnaire to compare the likability and perceived reliability of different robots. We also did a lot of literature research. We used the information from the interviews, the questionnaire, and the literature to guide and support our design decisions. Our final concept consists of the social and empathic robot Haru and a virtual learning platform, which is displayed on the “eyes” of the robot. We found that in the design of a study buddy, the following elements are important:
- the anthropomorphic appearance of the robot;
- the informal social interaction between the robot and the student;
- the ability to personalize the robot and the learning platform;
- the ability of the system to adapt to the speed and skill level of the student;
- the motivation for children to learn;
- gamification elements to make learning fun;
- the use of humor and videos;
- the user-friendliness of the system.
Discussion
At the start of the project it was not clear what requirements were needed for the robot. With the help of interviews, a questionnaire and a lot of literature, the requirements for the robot needed to help feeble-minded children were clear for us. These findings can be found in the conclusion above.
When the interview scheme was set-up, COVID-19 arrived in the Netherlands and severe measures were taken. This made it almost impossible to interview teachers since they were already under a lot of pressure to make online learning possible, a few of the teachers were also sick. Via Skype and the use of phone interviews we were still able to interview two teachers. There were also intentions to test our developed product with children, however this was not possible due to the corona crisis.
References
Ackerman, E. (2018). Haru: An Experimental Social Robot From Honda Research. Retrieved from https://spectrum.ieee.org/automaton/robotics/home-robots/haru-an-experimental-social-robot-from-honda-research
Aylett, M. P., Sutton, S. J., & Vazquez-Alvarez, Y. (2019, August). The right kind of unnatural: designing a robot voice. In Proceedings of the 1st International Conference on Conversational User Interfaces (pp. 1-2).
Bevolkingsteller. (2019). Retrieved from https://www.cbs.nl/nl-nl/visualisaties/bevolkingsteller
Bexkens, A., Petry, K., Graas, D., & Huizinga, M. (2018). Kinderen met een licht verstandelijke beperking binnen het regulier onderwijs: Een visie op M-decreet en Passend onderwijs. Zorgbreed, 59, 7.
Broussard, S. C., & Garrison, M. B. (2004). The relationship between classroom motivation and academic achievement in elementary‐school‐aged children. Family and consumer sciences research journal, 33(2), 106-120.
Calvert, S. L., Watson, J. A., Brinkley, V., & Bordeaux, B. (1989). Computer presentational features for young children’s preferential selection and recall of information. Journal of Educational Computing Research, 5, 35-49.
Cole, R. W. (2008). Educating everybody’s children: We know what works—And what doesn’t. Educating everybody’s children: Diverse teaching strategies for diverse learners, 2, 1-40.
Duffy, B. R. (2003). Anthropomorphism and the social robot. Robotics and autonomous systems, 42(3-4), 177-190.
Gomez, R., Szapiro, D., Galindo, K., & Nakamura, K. (2018, February). Haru: Hardware design of an experimental tabletop robot assistant. In Proceedings of the 2018 ACM/IEEE international conference on human-robot interaction (pp. 233-240).
Kaminski, J. A., & Sloutsky, V. M. (2020). The use and effectiveness of colorful, contextualized, student-made material for elementary mathematics instruction. International Journal of STEM Education, 7(1). https://doi.org/10.1186/s40594-019-0199-7
Kiryakova, G., Angelova, N., & Yordanova, L. (2014). Gamification in education. Proceedings of 9th International Balkan Education and Science Conference.
likeability. (n.d.) American Heritage® Dictionary of the English Language, Fifth Edition. (2011). Retrieved March 25 2020 from https://www.thefreedictionary.com/likeability
McGuire, P., Tu, S., Logue, M. E., Mason, C. A., & Ostrow, K. (2017). Counterintuitive effects of online feedback in middle school math: results from a randomized controlled trial in ASSISTments. Educational Media International, 54(3), 231–244. https://doi.org/10.1080/09523987.2017.1384161
Möller, E., & Bögels, S. (2017). Sociale angst bij kinderen: de rol van ouders. In Pedagogiek in beeld (pp. 265-274). Bohn Stafleu van Loghum, Houten. Traag, T. (2018). Leerkrachten in het basisonderwijs. Centraal Bureau voor de Statistiek (CBS).
Ontwikkeling van het aantal leerlingen in het primair onderwijs. (2018). Retrieved from https://www.onderwijsincijfers.nl/kengetallen/po/leerlingen-po/aantallen-ontwikkeling-aantal-leerlingen
Prevalentie van verstandelijke beperking. (2020). Retrieved from https://www.volksgezondheidenzorg.info/onderwerp/verstandelijke-beperking/cijfers-context/huidige-situatie#node-prevalentie-van-verstandelijke-beperking
Scholen voor speciaal onderwijs bezwijken onder wachtlijsten. (2019). Retrieved from https://nos.nl/artikel/2303246-scholen-voor-speciaal-onderwijs-bezwijken-onder-wachtlijsten.html
Slob, A. (2019). Gemiddelde groepsgrootte in het basisonderwijs. Retrieved from https://www.rijksoverheid.nl/documenten/kamerstukken/2019/06/17/kamerbrief-over-groepsgrootte-en-leerling-leraarratio-in-basisonderwijs-2018
Softbank Robotics, (2018). NAO the humanoid and programmable robot | SoftBank Robotics. Retrieved 9 March 2020, from https://www.softbankrobotics.com/emea/en/nao
(Speciaal) basisonderwijs en speciale scholen; leerlingen, schoolregio. (2019). Retrieved from https://opendata.cbs.nl/statline/#/CBS/nl/dataset/71478ned/table?fromstatweb
Song, H., Zhang, Z., Barakova, E.I., Ham, J., and Markopoulos, P. (2020). Robot Role Design for Implementing Social Facilitation Theory in Musical Instruments Practicing. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’20). Association for Computing Machinery, New York, NY, USA, 253–260. DOI:https://doi.org/10.1145/3319502.3374787
Stott, A., & Neustaedter, C. (2013). Analysis of gamification in education. Surrey, BC, Canada, 8, 36.
Torta, E. (2014). Approaching independent living with robots. Eindhoven: Technische Universiteit Eindhoven. https://doi.org/10.6100/IR766648
Vogt, P., De Haas, M., De Jong, C., Baxter, P., & Krahmer, E. (2017). Child-robot interactions for second language tutoring to preschool children. Frontiers in human neuroscience, 11, 73.
Westlund, J. M. K., Martinez, M., Archie, M., Das, M., & Breazeal, C. (2016, August). Effects of framing a robot as a social agent or as a machine on children's social behavior. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 688-693). IEEE.
Złotowski, J., Proudfoot, D., Yogeeswaran, K., & Bartneck, C. (2014). Anthropomorphism: Opportunities and Challenges in Human-Robot Interaction. International Journal of Social Robotics, 7(3), 347-360.
Appendix
Interview
The informed consent of one of the teachers can be found here https://drive.google.com/file/d/1eHsEvn0dqDUF0GmCJOsoeOKGX23IjfUl/view?usp=sharing, for the other teacher the informed consent is verbally discussed and accepted since it was a telephonic interview. The transcribed interviews can be found here https://docs.google.com/document/d/1wtx7fIuavkSwVliaAukVuoHzeBIrl20MW3WxvxA89lI/edit?usp=sharing and here https://drive.google.com/file/d/17s7hyw6BZRw9JRd8kS9sgqcJ4IgrBKe-/view?usp=sharing.
Questionnaire
The questionnaire to rate likability and reliability of NAO, Cat, Haru and Tega can be found via the following link: https://forms.gle/LaM3a92fc291RqXo8 The answers can be found via this link: https://docs.google.com/spreadsheets/d/1GSezib3DFn73z_lVXR1Gw_-ydw4HzPBz1L0GM2UnZ0c/edit?usp=sharing
Peer review
The peer review file can be found here https://docs.google.com/document/d/1PyVj8bEPXwbH0IrTVZmQ6AMud_MbC5VP64EbdaFtHCQ/edit?usp=sharing.
Logbook
| Date | Name | Activity | Time spent (HH:MM) |
|---|---|---|---|
| 03/02/20 | All | Discussing the subject | 02:30 |
| 06/02/20 | Bob | Searching articles, writing SotA, structuring wiki | 05:30 |
| 06/02/20 | Teis | Writing problem statement, introduction, and who are the users | 05:15 |
| 06/02/20 | Tom | Searching articles, writing SotA | 04:45 |
| 06/02/20 | Emile | Searching articles, writing SotA | 03:30 |
| 06/02/20 | Nynke | Searching articles for and writing problem statement, introduction, milestones, deliverables | 05:30 |
| 12/02/20 | Bob | Making agenda meeting 1 | 00:30 |
| 13/02/20 | All | Tutor meeting; group meeting where scope of project was narrowed down | 03:00 |
| 13/02/20 | Nynke & Tom | Working out of the interview | 01:00 |
| 16/02/20 | Emile | Start concept learning platform and research virtual assistants/study platform | 04:00 |
| 16/02/20 | Teis | Further literature search; rewriting existing text | 02:30 |
| 16/02/20 | Nynke | Writing questions for the interview | 02:30 |
| 17/02/20 | Nynke & Tom | Working out of the interview | 02:00 |
| 17/02/20 | Bob | Work out Users; further literature search | 02:30 |
| 19/02/20 | Teis | Making agenda meeting 2 | 00:30 |
| 20/02/20 | Teis, Tom & Nynke | Tutor meeting and discuss changes, make plan and divide tasks | 01:30 |
| 28/02/20 | Teis | Rewriting text; extending SotA with Haru | 03:30 |
| 29/02/20 | Nynke | Improve interview questions and write informed consent | 02:00 |
| 02/03/20 | Nynke, Tom & Teis | Group meeting; preparations for presentation; finalizing interview preparations | 02:00 |
| 03/03/20 | Emile | Starting app mock-up | 02:00 |
| 04/03/20 | Emile | continuing app mock-up | 02:00 |
| 04/03/20 | Tom | Preparing presentation and making presentation slides | 01:30 |
| 04/03/20 | Bob | Haru SotA | 01:00 |
| 05/03/20 | Emile | continuing app mock-up | 02:00 |
| 05/03/20 | All | Presentation session + planning making | 03:30 |
| 06/03/20 | Bob | Research Haru | 01:00 |
| 07/03/20 | Nynke | Testing online learning platforms (SoTA) | 02:00 |
| 09/03/20 | Tom, Teis, Nynke & Bob | Group meeting, work indivually and discuss in the meantime | 03:30 |
| 09/03/20 | Bob | Summarize SotA | 01:00 |
| 09/03/20 | Emile | Research on gamification | 02:00 |
| 10/03/20 | Tom | Checking interview questions | 01:00 |
| 11/03/20 | Tom | Preparing interview and doing the first interview | 02:00 |
| 11/03/20 | Teis | Write scenario and start on impact section | 02:30 |
| 12/03/20 | Nynke | Literature research about online learning platforms | 01:30 |
| 12/03/20 | All | Group meeting: discuss progress and set new goals | 03:00 |
| 12/03/20 | Bob | Do research about other robots and make questionnaire | 02:00 |
| 13/03/20 | Emile | Login overhaul mock-up app | 02:00 |
| 15/03/20 | Tom | Transcribing first interview | 03:30 |
| 16/03/20 | Bob | Adjust questionnaire and send questionnaire to participants | 01:00 |
| 17/03/20 | Teis | Adjust and add gamification to report and make some more adjustments to report | 01:30 |
| 17/03/20 | Emile | Implementing gamification: layout and "levels" mock-up app | 02:00 |
| 18/03/20 | Teis | Including interaction robot-child in impact section and elaborating on concept | 02:00 |
| 18/03/20 | Bob | Making graph 'Likability and Reliability' | 02:30 |
| 18/03/20 | Nynke | Write down interaction between robot and student in more detail | 03:00 |
| 19/03/20 | Teis, Tom, Bob & Nynke | Group meeting (partly with tutor) via skype | 01:00 |
| 19/03/20 | Emile | Implementing gamification: rewards, personalisation screen mock-up app | 02:00 |
| 24/03/20 | Tom | finsihing transcribing and highlighting | 03:00 |
| 23/03/20 | Bob | Making Likability and reliability section | 03:30 |
| 23/03/20 | Nynke | Preparing and conducting the interview with an elementary school teacher | 01:30 |
| 24/03/20 | Nynke | Transcribing part of the interview | 02:30 |
| 24/03/20 | Emile | Implementing gamification: exercise, streamlining and ease of access | 03:00 |
| 24/03/20 | Teis | Working on state diagram and writing part of concept section by adding attention | 03:30 |
| 25/03/20 | Bob | Deepen likability and reliability section | 01:30 |
| 25/03/20 | Nynke | Transcribing part of the interview and highlighting important phrases | 03:30 |
| 26/03/20 | All | Skype meeting with planning session afterwards | 01:00 |
| 28/03/20 | Emile | Implementing gamification: rewards interactions, finishing touches mock-up app | 02:00 |
| 30/03/20 | Bob | Started working on the video-script | 03:00 |
| 30/03/20 | Nynke | Checking and improving the wiki-page | 01:30 |
| 30/03/20 | Bob | Fill in the remained gaps in the SotA summary table | 00:30 |
| 31/03/20 | Tom | Checking the wiki-page and making a start with the interview part for the wiki | 01:00 |
| 01/04/20 | Nynke | Checking and improving the wiki-page | 01:15 |
| 01/04/20 | Teis | Working on persona, scenario and state diagrams; altering text accordingly | 06:00 |
| 01/04/20 | Tom | Finalising part of the interview for the wiki | 03:00 |
| 02/04/20 | Teis, Tom, Bob & Nynke | Weekly meeting with planning session afterwards | 01:00 |
| 02/04/20 | Emile | Mock-up app finishing: debugging, getting rid of useless code, etc. | 03:00 |
| 02/04/20 | Bob | Working on script and started working on powerpoint | 04:00 |
| 02/04/20 | Nynke | Working on script and powerpiont | 02:00 |
| 03/04/20 | Bob | Working on powerpoint | 02:30 |
| 03/04/20 | Nynke | Working on script and powerpoint | 01:00 |
| 03/04/20 | Teis | Working on script and making video | 03:00 |
| 03/04/20 | Bob | Adjusting script because it was too long | 03:00 |
| 03/04/20 | Tom | Improving the wiki and adding drive documents | 01:30 |
| 04/04/20 | Teis & Bob | Adjusting script and recording video (Teis) | 02:30 |
| 04/04/20 | Nynke | Writing the conclusion | 01:00 |
| 04/04/20 | Emile | Start editing presentation, finish app mock-up needs for demo | 03:00 |
| 05/04/20 | Tom | Writing the Discussion | 01:00 |
| 06/04/20 | Emile | Recording voices demo, start editing demo | 03:00 |
| 06/04/20 | Nynke | Reading check of the wiki, making small adjustments | 00:40 |