Embedded Motion Control 2017 Group 10: Difference between revisions
Jump to navigation
Jump to search
| Line 80: | Line 80: | ||
===''Functions''=== | ===''Functions''=== | ||
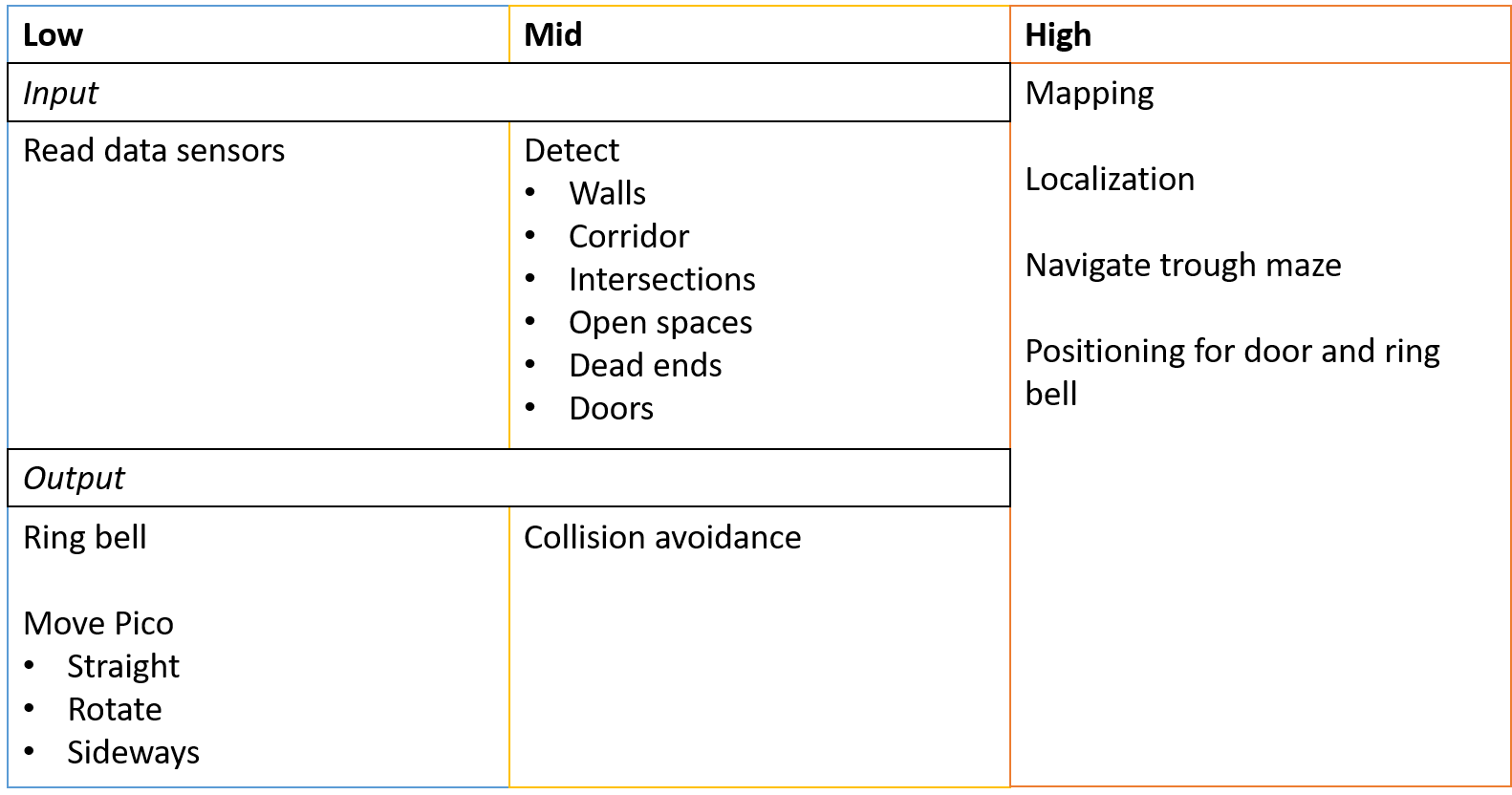
The functions are categorized in three different levels of complexity: Low, Mid and High level. An overview of the functions is given in Figure 2. | The functions are categorized in three different levels of complexity: Low, Mid and High level. An overview of the functions is given in Figure 2. | ||
[[File:Interface picture.png|thump| | [[File:Interface picture.png|thump|center|600px|alt=Interface diagram group 10.|Figure 2: Function overview. The functions are grouped based on complexity as well as input/output type.]] | ||
===''Components''=== | ===''Components''=== | ||
Revision as of 10:40, 10 May 2017
Group Members
| 0773865 | Tim Coerver |
| 0953805 | Pieter de Groot |
| 0970955 | Jos Terlouw |
| 0973811 | Bas Vermij |
| 0972391 | Roel Vromans |
| 0975718 | Corné van Haren |
Initial Design
Requirements
- Software easy to setup
- Updated with one easy command, e.g. 'git pull'.
- Software can be compiled using 'cmake' and 'make'.
- One executable to start software.
- Autonomously solving the corridor challenge
- Solving the corridor challenge has to be done within 5 minutes.
- Autonomously solving the maze challenge
- Solving the maze challenge has to be done within 7 minutes.
- Avoiding collision
- Do not bump into walls or doors.
- Recognize and open a door in the maze
- There might be multiple dead ends in the maze, one of which is a door. The robot has to be autonomously open the door (by ringing a bell) to solve the maze.
- Detect corridors, corners, T-junctions and intersections
- The maze and corridor challenge consists of several, corridors, corners, T-junctions and intersections. Various algorithms created in order to detect these.
- Navigate through corridors, corners, T-junctions and intersections
- When corridors, corners, T-junctions and intersections are detected, the robot has to drive trough these. In order to do this, strategies have to be created for each of these.
- Detecting dead ends
- The maze can contain dead ends, these have to be distinguished from doors.
- Detecting maze exit
- The exit of the maze has to be detected in order to know when the maze is finished.
- Navigate open spaces
- The maze can contain open spaced, when these are detected these has to be explored by navigating trough them.
Specifications
The specifications are related to the requirements specified above.
- The time to reach the end of the maze is 7 minutes.
- The time to accomplish the corridor challenge is 5 minutes
- The robot may not be idle for more than 30 seconds.
- When the robot find a door, it rings a bell and the door will be opened manually.
- Two attempts to solve the maze are allowed. Both attempts have to be finished within 7 minutes total.
- Two attempts are allowed to solve the corridor challenge. Both attempts have to be finished within 5 minutes.
- When the robot bumps into a wall the attempt is over.
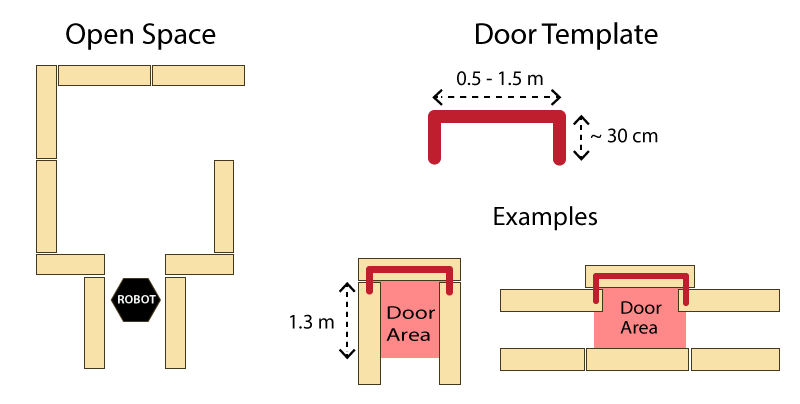
Specifications of the maze
- All walls are positioned approximately perpendicular to one another.
- Open spaces might occur (as depicted in Figure 1 ).
- There may be loops in the maze, which means that some walls may not be connected to other walls.
- Walls are approximately parallel.
Doors and open spaces are specified as described by Figure 1

Figure 1: Maze open spaces and door specifications.
Functions
The functions are categorized in three different levels of complexity: Low, Mid and High level. An overview of the functions is given in Figure 2.

Components
The following components are accessible on the pico:
- Sensors
- Laser Range Finder (LFR)
- Wheel encoders (odometry)
- Actuators
- Holonomic Base (Omni-wheels)
- Computer
- CPU Intel i7
- OS Ubuntu 14.04
Specifications
Interface
Weekly Planning
- finish all tutorials if you dont have already before 8 may.
- Make design document deadline: 10 may
- Think about design.
- Think more about design.
- plan a meeting with our supervisor(s)
- Add everyone to the git repository