Embedded Motion Control 2015 Group 10: Difference between revisions
Jump to navigation
Jump to search
| Line 85: | Line 85: | ||
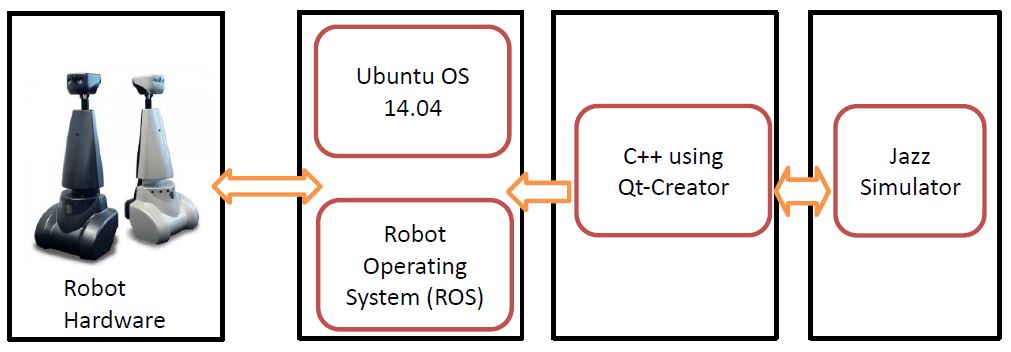
=Interface= | =Interface= | ||
[[File:interface.jpeg|center|]] | |||
Revision as of 16:09, 5 May 2015
Group Details
| S No | Name | Student ID | Email ID |
|---|---|---|---|
| 1 | Sudarsan Kumar Venkatesan | 0925292 | s.k.venkatesan@student.tue.nl |
| 2 | Manoj Kannan Soundarapandian | 0925101 | m.k.soundarapandian@student.tue.nl |
| 3 | Srinivas Subramanian | 0925168 | s.subramanian@student.tue.nl |
| 4 | Sankar Chandrasekar | 0923562 | s.chandrasekar@student.tue.nl |
| 5 | Vasanth Subramaniam | 0927487 | v.subramaniam@student.tue.nl |
| 6 | Akshay Vaidhiyanathan | 0877940 | a.vaidhiyanathan@student.tue.nl |
| 7 | Avinash Visagan Varadarajan | 0925263 | a.v.varadarajan@student.tue.nl |
Objective
Design and implement a robotic software system for the robots Pico/Taco, such that they are able to solve a maze in shortest time possible.
Requirements
- The robot should exit the maze as quickly as possible.
- The robot should align itself along the path orientation.
- The robot should avoid collision with the walls.
- The robot should be able to detect and differentiate between doors and walls.
- The robot should be able to identify that it has reached the end the maze.
Functions
- Navigation
- The robot should move along its Y-axis.
- The robot should stop before taking a turn.
- The robot should rotate 180o in case of a dead end.
- The robot should rotate 90o to its left or right when it encounters a corner.
- Sensing
- The robot should sense doors and walls.
- The robot should go through in case of door.
- The robot should sense the difference between a dead end, a corner with a right or left opening.
- The robot should stop once it exits the maze.
Components

Specifications
- Robot : A-MAZE-ING PICO
- Sensors:
- Laser sensor
- Actuators:
- Holonomic base (Omni - wheels)
- Computer:
- Running Ubuntu 12.04
- ROS (Robot Operating) - RVIZ
- Subversion
Interface
