Summary Chiel van der Laan: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 1: | Line 1: | ||
The problem of mapping can be solved by constructing a 2D scan with a LIDAR system from a 3D environment. [https://pdfs.semanticscholar.org/175b/c509a79996af94b4702704fa2964d37c9a09.pdf <nowiki>[1]</nowiki>] After which it the localization can be done in the 2D mapped environment for lower processing power.[https://pdfs.semanticscholar.org/56ba/648ea86bd80485db165ff16ea35f8723741a.pdf <nowiki>[2]</nowiki>] An example of the visual validation of localization can be seen in figure 1. The LIDAR system for the mapping and localization has to be able to scan a large area at once and has to be high on top of the mobility scooter because of this. | The problem of mapping can be solved by constructing a 2D scan with a LIDAR system from a 3D environment. [https://pdfs.semanticscholar.org/175b/c509a79996af94b4702704fa2964d37c9a09.pdf <nowiki>[1]</nowiki>] After which it the localization can be done in the 2D mapped environment for lower processing power.[https://pdfs.semanticscholar.org/56ba/648ea86bd80485db165ff16ea35f8723741a.pdf <nowiki>[2]</nowiki>] An example of the visual validation of localization can be seen in figure 1. The LIDAR system for the mapping and localization has to be able to scan a large area at once and has to be high on top of the mobility scooter because of this.[[File:Map_example.png|400px|thumb|Right|Figure 1: Autonomous navigation with synthetic virtual LIDAR. Images on the right from top to bottom correspond to visual validation of localization repeatability from checkpoint A to E.[https://pdfs.semanticscholar.org/56ba/648ea86bd80485db165ff16ea35f8723741a.pdf <nowiki>[2]</nowiki>] ]] | ||
Revision as of 15:49, 18 February 2018
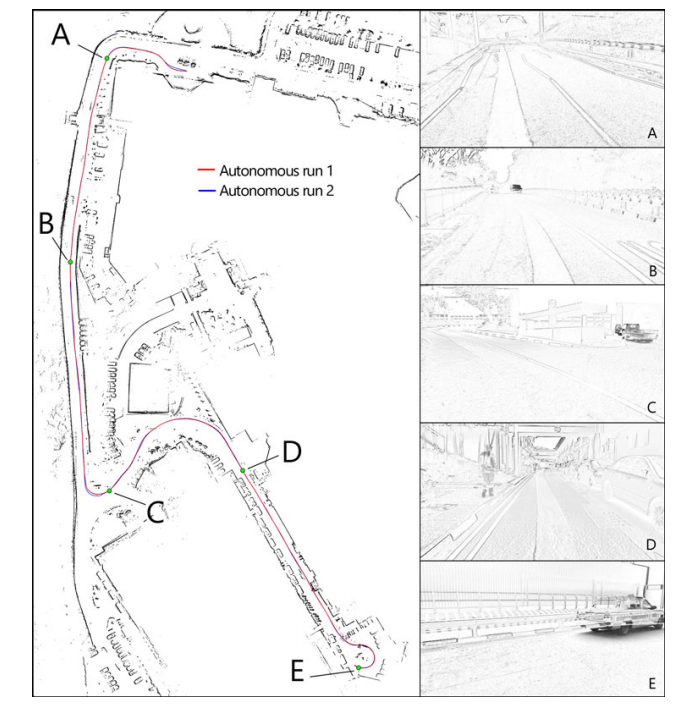
The problem of mapping can be solved by constructing a 2D scan with a LIDAR system from a 3D environment. [1] After which it the localization can be done in the 2D mapped environment for lower processing power.[2] An example of the visual validation of localization can be seen in figure 1. The LIDAR system for the mapping and localization has to be able to scan a large area at once and has to be high on top of the mobility scooter because of this.

Figure 1: Autonomous navigation with synthetic virtual LIDAR. Images on the right from top to bottom correspond to visual validation of localization repeatability from checkpoint A to E.[2]
