Unused files
Jump to navigation
Jump to search
The following files exist but are not embedded in any page. Please note that other web sites may link to a file with a direct URL, and so may still be listed here despite being in active use.
Showing below up to 500 results in range #21 to #520.
 Pizzadoc.pdf ; 407 KB
Pizzadoc.pdf ; 407 KB
- STARTUP.pdf ; 96 KB
- EMC API.pdf ; 156 KB
 Com src.zip ; 6 KB
Com src.zip ; 6 KB
- Ubuntu install embedded pc..pdf ; 247 KB
- Link.pdf ; 362 KB
- Frfmag.m ; 2 KB
- Frfphase.m ; 2 KB
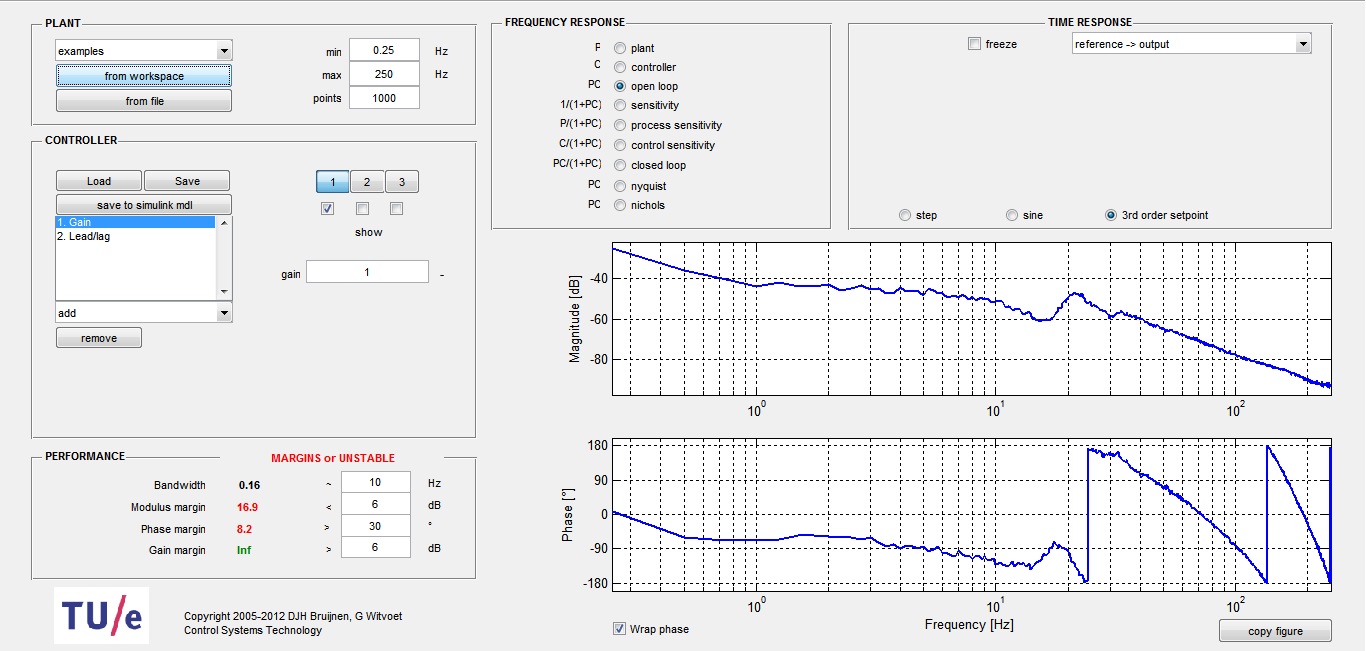
 Gui.png 1,002 × 832; 130 KB
Gui.png 1,002 × 832; 130 KB
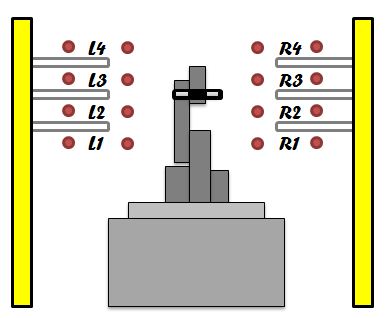
 Model.png 665 × 374; 67 KB
Model.png 665 × 374; 67 KB
 Structure.PNG 1,094 × 456; 38 KB
Structure.PNG 1,094 × 456; 38 KB
- MORSE installation guide.pdf ; 69 KB
- Bode.pdf ; 10 KB
- Frf.pdf ; 10 KB
- Frf.m ; 14 KB
- Pc configuration.pdf ; 91 KB
- Introduction-to-ROS.pdf ; 359 KB
- Jazz gazebo simulator.pdf ; 373 KB
- Jazz packages.zip ; 15 KB
- Powerpoint chapter 4.zip ; 1.26 MB
- Lecture 2 Chapter 4.pdf ; 472 KB
- Powerpoint Chapter 1.pdf ; 881 KB
- Arrow.pdf ; 43 KB
- VisualStatusReportV1.pdf ; 9 KB
- Tasks.pdf ; 573 KB
 Maze1.gif 262 × 262; 16 KB
Maze1.gif 262 × 262; 16 KB
 Maze2.gif 262 × 262; 18 KB
Maze2.gif 262 × 262; 18 KB
- CH08 group06 Other Kernel Objects.zip ; 2.01 MB
 Path detection1.jpg 330 × 416; 41 KB
Path detection1.jpg 330 × 416; 41 KB
 Path detection.jpg 990 × 416; 102 KB
Path detection.jpg 990 × 416; 102 KB
 FLOW 1.jpg 519 × 1,072; 70 KB
FLOW 1.jpg 519 × 1,072; 70 KB
- Chapter9.pdf ; 2.29 MB
- Arrows emc.zip ; 276 KB
 Houghpoint1.png 502 × 632; 14 KB
Houghpoint1.png 502 × 632; 14 KB
 Arrow fooled.png 640 × 480; 275 KB
Arrow fooled.png 640 × 480; 275 KB
 Arrow to-the-left.png 640 × 480; 125 KB
Arrow to-the-left.png 640 × 480; 125 KB
 Arrow to-the-right.png 640 × 480; 132 KB
Arrow to-the-right.png 640 × 480; 132 KB
 G8 1.png 307 × 305; 35 KB
G8 1.png 307 × 305; 35 KB
 G8 2.png 307 × 305; 23 KB
G8 2.png 307 × 305; 23 KB
 G8 3.png 561 × 249; 5 KB
G8 3.png 561 × 249; 5 KB
 G8 4.png 307 × 305; 2 KB
G8 4.png 307 × 305; 2 KB
 G8 5.png 307 × 305; 2 KB
G8 5.png 307 × 305; 2 KB
 G8 6.png 561 × 249; 4 KB
G8 6.png 561 × 249; 4 KB
 G8 7.png 225 × 182; 971 bytes
G8 7.png 225 × 182; 971 bytes
 G8 8.png 561 × 249; 4 KB
G8 8.png 561 × 249; 4 KB
 FLOW 2.jpg 488 × 402; 33 KB
FLOW 2.jpg 488 × 402; 33 KB
 Exit.jpg 323 × 319; 8 KB
Exit.jpg 323 × 319; 8 KB
 Align.jpg 300 × 338; 20 KB
Align.jpg 300 × 338; 20 KB
 Align2.jpg 313 × 300; 12 KB
Align2.jpg 313 × 300; 12 KB
 Untitled1.jpg 484 × 326; 14 KB
Untitled1.jpg 484 × 326; 14 KB
 G5 Untitled5.jpg 484 × 326; 14 KB
G5 Untitled5.jpg 484 × 326; 14 KB
 Strategy scheme.JPG 989 × 694; 196 KB
Strategy scheme.JPG 989 × 694; 196 KB
- G9 robot errors.pdf ; 29 KB
 1 Input.jpg 640 × 480; 48 KB
1 Input.jpg 640 × 480; 48 KB
 2 HSV image.jpg 640 × 480; 48 KB
2 HSV image.jpg 640 × 480; 48 KB
 3 Binary Image.jpg 640 × 480; 13 KB
3 Binary Image.jpg 640 × 480; 13 KB
 4 Erode.jpg 640 × 480; 11 KB
4 Erode.jpg 640 × 480; 11 KB
 5 Output edge.jpg 640 × 480; 12 KB
5 Output edge.jpg 640 × 480; 12 KB
 6 contour.jpg 640 × 480; 13 KB
6 contour.jpg 640 × 480; 13 KB
- Flowchart algorithm.pdf ; 111 KB
 Movie3.png 186 × 104; 12 KB
Movie3.png 186 × 104; 12 KB
 Bigmaze.png 171 × 96; 15 KB
Bigmaze.png 171 × 96; 15 KB
- MazePlotting.pdf ; 270 KB
 Program structure2.png 1,364 × 841; 150 KB
Program structure2.png 1,364 × 841; 150 KB
 Program structure final.png 1,360 × 842; 149 KB
Program structure final.png 1,360 × 842; 149 KB
 Program final final.png 1,373 × 843; 149 KB
Program final final.png 1,373 × 843; 149 KB
- Final presentation 7.pdf ; 963 KB
- Final presentation group06.zip ; 1.06 MB
 Mazes1.png 1,600 × 900; 616 KB
Mazes1.png 1,600 × 900; 616 KB
- Herstelscript.zip ; 12 KB
- Summary Control Engineering.pdf ; 161 KB
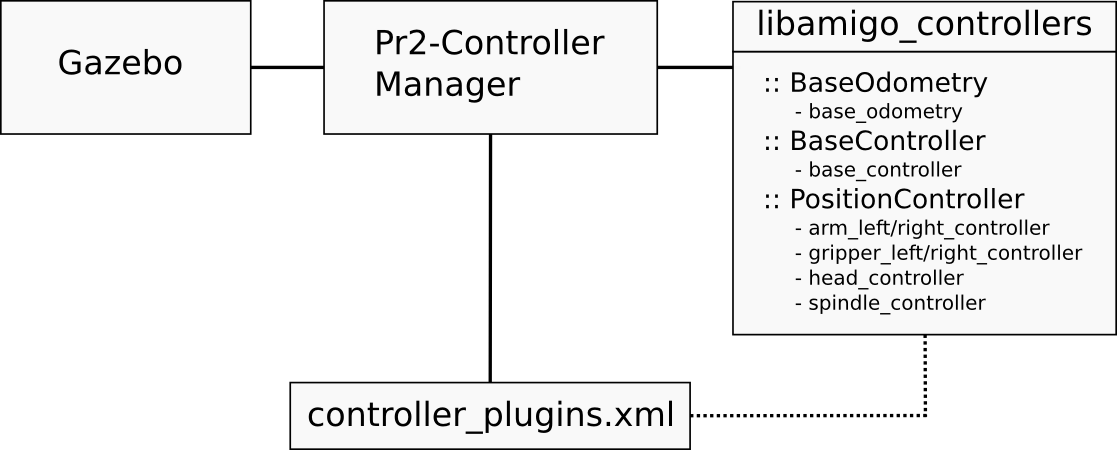 Amigo gazebo structure.png 1,117 × 450; 76 KB
Amigo gazebo structure.png 1,117 × 450; 76 KB
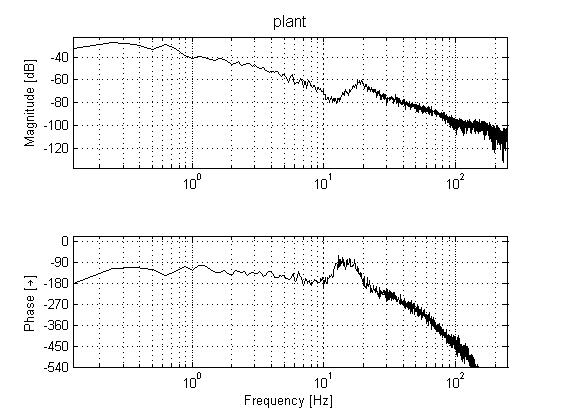 FRF vertical movement.jpg 561 × 420; 53 KB
FRF vertical movement.jpg 561 × 420; 53 KB
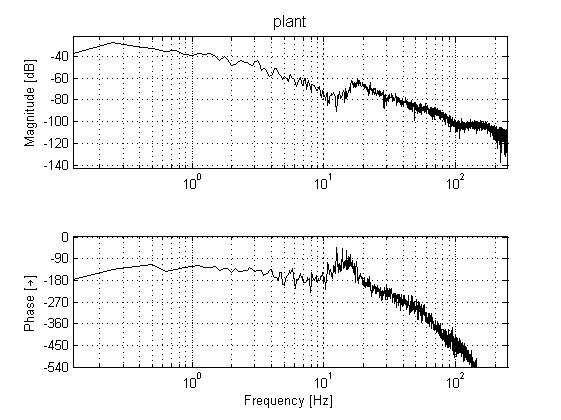 FRF vertical movement (2).jpg 561 × 420; 54 KB
FRF vertical movement (2).jpg 561 × 420; 54 KB
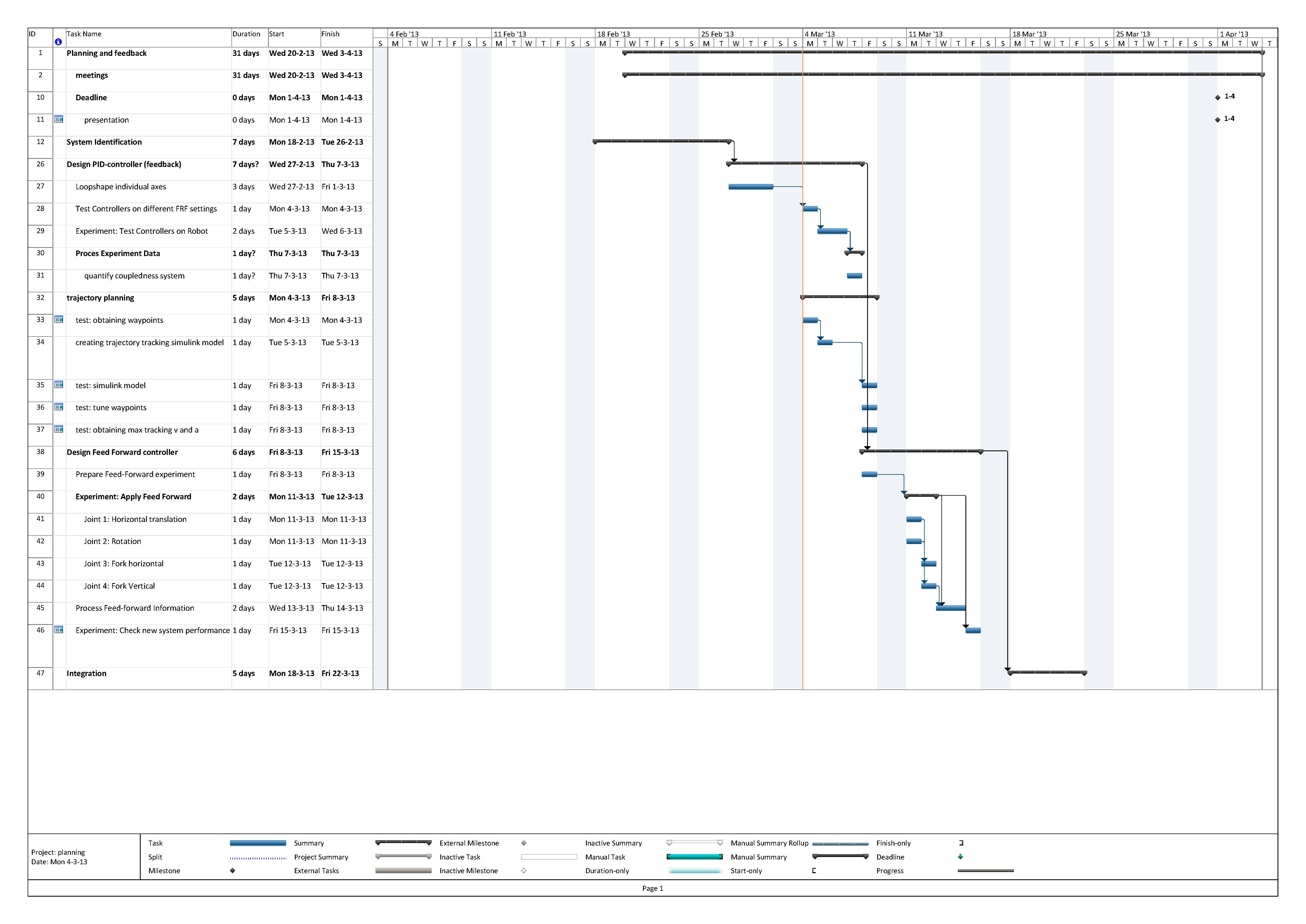 Planning.jpg 4,678 × 3,309; 644 KB
Planning.jpg 4,678 × 3,309; 644 KB
- Group2.frf axis1 LR.pdf ; 8 KB
 Shapeit.jpg 1,366 × 651; 225 KB
Shapeit.jpg 1,366 × 651; 225 KB
 Robot points.JPG 388 × 318; 24 KB
Robot points.JPG 388 × 318; 24 KB
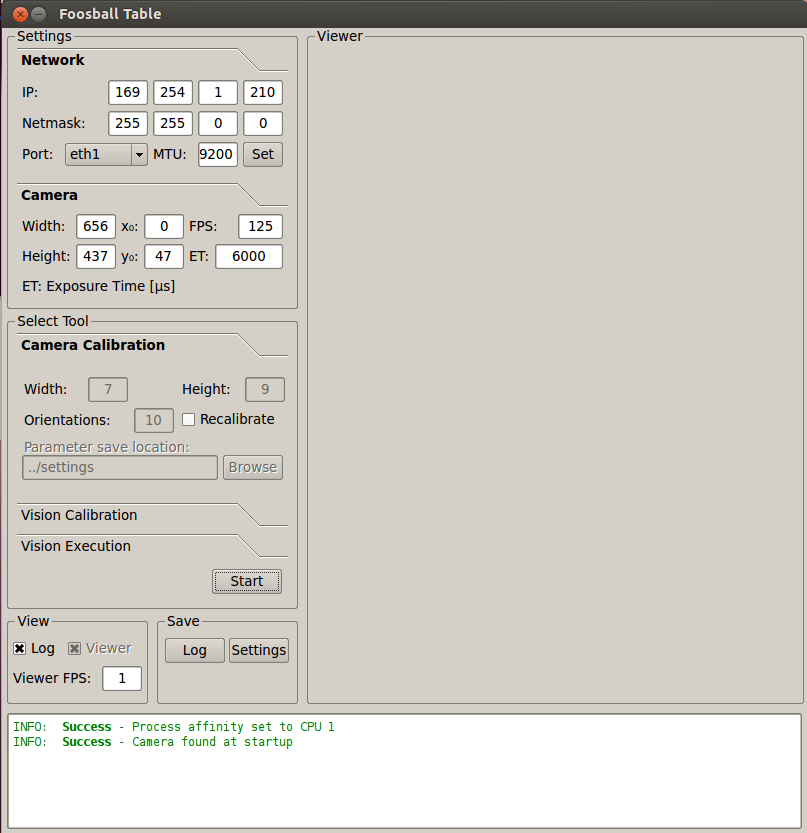 Vision gui2.png 807 × 833; 64 KB
Vision gui2.png 807 × 833; 64 KB
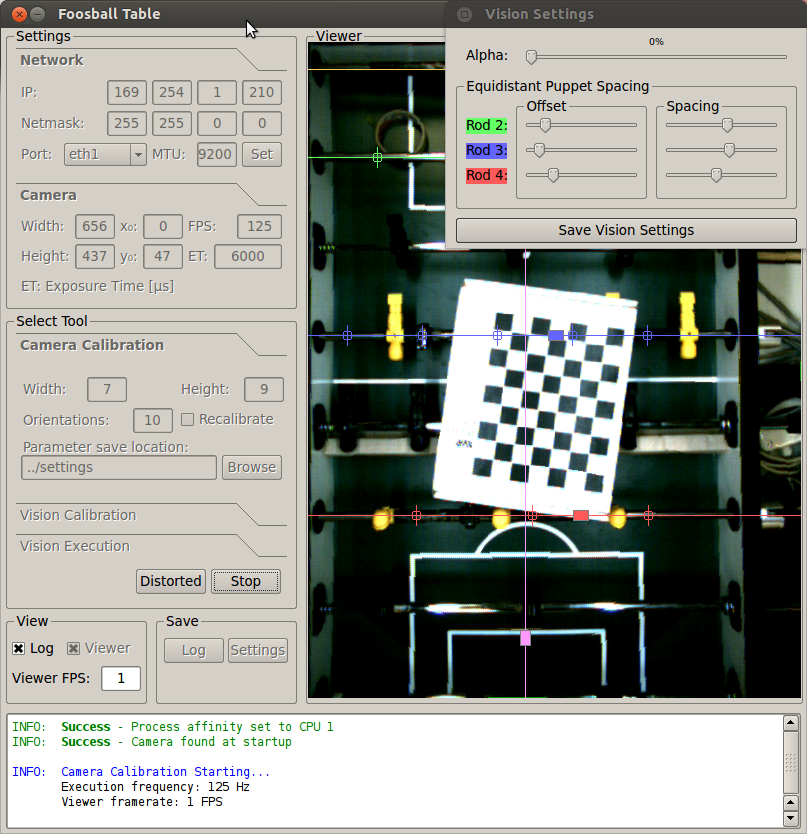 Vision gui3.png 807 × 834; 437 KB
Vision gui3.png 807 × 834; 437 KB
 Vision gui4.png 807 × 834; 81 KB
Vision gui4.png 807 × 834; 81 KB
 Vision gui5.png 807 × 834; 74 KB
Vision gui5.png 807 × 834; 74 KB
 Vision viewer.png 202 × 135; 14 KB
Vision viewer.png 202 × 135; 14 KB
 Maze.png 561 × 420; 3 KB
Maze.png 561 × 420; 3 KB
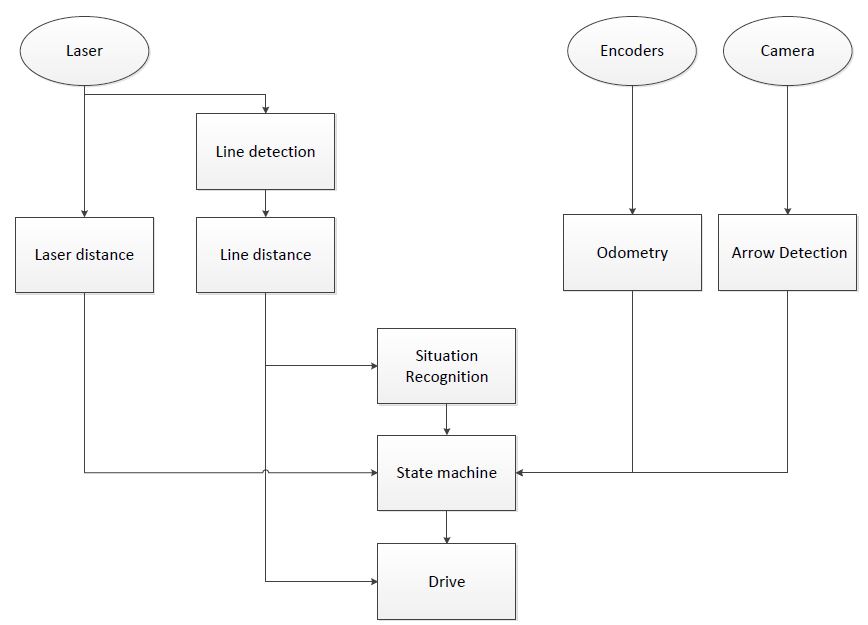
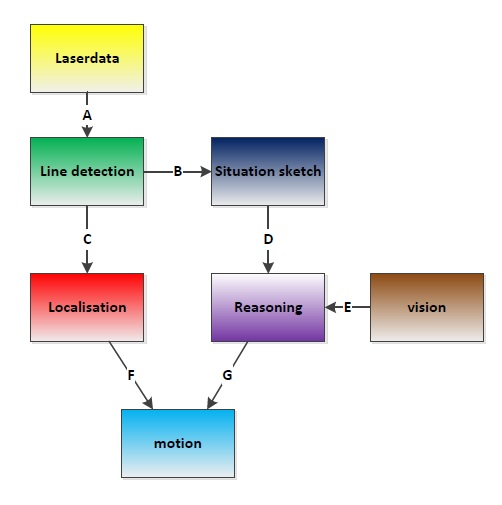 Software architecture.jpg 502 × 505; 28 KB
Software architecture.jpg 502 × 505; 28 KB
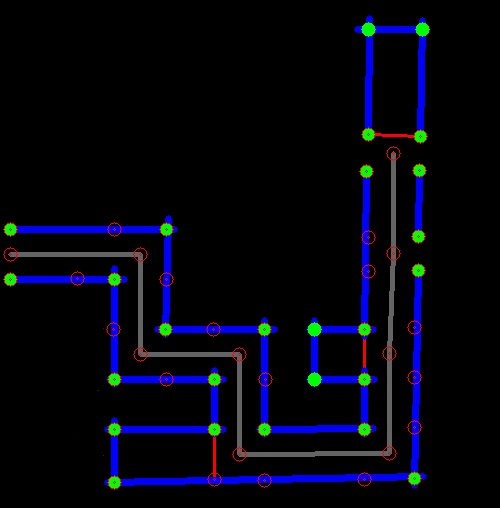
 Maze lines.png 1,615 × 971; 8 KB
Maze lines.png 1,615 × 971; 8 KB
 Flowchart situation.gif 1,005 × 563; 39 KB
Flowchart situation.gif 1,005 × 563; 39 KB
 Flowchart localistion .gif 1,005 × 563; 40 KB
Flowchart localistion .gif 1,005 × 563; 40 KB
 Flowchart location.gif 1,005 × 563; 40 KB
Flowchart location.gif 1,005 × 563; 40 KB
 Localisation.gif 551 × 627; 16 KB
Localisation.gif 551 × 627; 16 KB
 Situation corridor challenge.gif 854 × 400; 17 KB
Situation corridor challenge.gif 854 × 400; 17 KB
- Localization.pdf ; 539 KB
- Scan0003.pdf ; 539 KB
 Flowchart.png 657 × 993; 41 KB
Flowchart.png 657 × 993; 41 KB
 Winning!.jpg 2,592 × 1,552; 862 KB
Winning!.jpg 2,592 × 1,552; 862 KB
 Linetype.png 625 × 492; 12 KB
Linetype.png 625 × 492; 12 KB
 Situation.png 854 × 513; 42 KB
Situation.png 854 × 513; 42 KB
 DetectCornerLeft.jpg 411 × 234; 10 KB
DetectCornerLeft.jpg 411 × 234; 10 KB
 Cornerleft.jpg 411 × 234; 10 KB
Cornerleft.jpg 411 × 234; 10 KB
 Gaussian.png 1,920 × 948; 15 KB
Gaussian.png 1,920 × 948; 15 KB
 Cornerdetection.png 1,920 × 948; 27 KB
Cornerdetection.png 1,920 × 948; 27 KB
 Signal inter 1.jpg 376 × 277; 13 KB
Signal inter 1.jpg 376 × 277; 13 KB
 Signal inter 2.jpg 349 × 299; 17 KB
Signal inter 2.jpg 349 × 299; 17 KB
 Signal inter 3.jpg 258 × 505; 14 KB
Signal inter 3.jpg 258 × 505; 14 KB
 Motion planner 1.jpg 287 × 336; 12 KB
Motion planner 1.jpg 287 × 336; 12 KB
 Motion planner 2.jpg 801 × 343; 32 KB
Motion planner 2.jpg 801 × 343; 32 KB
 ROS structure corridor.png 1,459 × 188; 42 KB
ROS structure corridor.png 1,459 × 188; 42 KB
 Rosgraph corridor strucure.png 1,459 × 188; 42 KB
Rosgraph corridor strucure.png 1,459 × 188; 42 KB
 Rosgraph corridor structure.png 1,473 × 196; 51 KB
Rosgraph corridor structure.png 1,473 × 196; 51 KB
 Pf.png 1,473 × 196; 51 KB
Pf.png 1,473 × 196; 51 KB
- NodeStructure.pdf ; 21 KB
 Reference algoritm.png 1,367 × 651; 6 KB
Reference algoritm.png 1,367 × 651; 6 KB
 Drive par.jpg 880 × 535; 36 KB
Drive par.jpg 880 × 535; 36 KB
- Red arrow.pdf ; 731 KB
 Situation Identification.png 340 × 382; 4 KB
Situation Identification.png 340 × 382; 4 KB
 Slide1.JPG 646 × 375; 44 KB
Slide1.JPG 646 × 375; 44 KB
- Em09 left.pdf ; 4 KB
 Emc09 diagram1.jpg 1,004 × 493; 78 KB
Emc09 diagram1.jpg 1,004 × 493; 78 KB
 Contours Example.jpg 422 × 431; 12 KB
Contours Example.jpg 422 × 431; 12 KB
 Biggest Controur.jpg 351 × 242; 10 KB
Biggest Controur.jpg 351 × 242; 10 KB
 Slide1.jpg 388 × 225; 23 KB
Slide1.jpg 388 × 225; 23 KB
 Laser problem.gif 600 × 350; 354 KB
Laser problem.gif 600 × 350; 354 KB
 Small mov size21.gif 600 × 350; 718 KB
Small mov size21.gif 600 × 350; 718 KB
- EMC02 Architecture.pdf ; 52 KB
- Brain Flow-chart.pdf ; 7 KB
 EMC02 Situation Identification II.png 372 × 391; 6 KB
EMC02 Situation Identification II.png 372 × 391; 6 KB
 EMC02 180Turn.png 412 × 202; 4 KB
EMC02 180Turn.png 412 × 202; 4 KB
 Main flowchart.png 776 × 1,134; 53 KB
Main flowchart.png 776 × 1,134; 53 KB
 Screenshot scan.png 945 × 329; 9 KB
Screenshot scan.png 945 × 329; 9 KB
 Screenshot diff.png 945 × 329; 12 KB
Screenshot diff.png 945 × 329; 12 KB
 Screenshot gazebo.png 1,534 × 817; 142 KB
Screenshot gazebo.png 1,534 × 817; 142 KB
 Emc09 Fluxogram.jpg 1,117 × 2,737; 338 KB
Emc09 Fluxogram.jpg 1,117 × 2,737; 338 KB
 Diagram1.jpg 1,117 × 2,737; 338 KB
Diagram1.jpg 1,117 × 2,737; 338 KB
 Diagram3.jpg 1,360 × 537; 99 KB
Diagram3.jpg 1,360 × 537; 99 KB
 Method 1.png 339 × 42; 1 KB
Method 1.png 339 × 42; 1 KB
 Method 2.png 323 × 42; 1 KB
Method 2.png 323 × 42; 1 KB
 Method 3.png 329 × 42; 1 KB
Method 3.png 329 × 42; 1 KB
 Method 4.png 418 × 62; 2 KB
Method 4.png 418 × 62; 2 KB
 Method 5.png 418 × 61; 2 KB
Method 5.png 418 × 61; 2 KB
 Method 6.png 430 × 61; 2 KB
Method 6.png 430 × 61; 2 KB
 EMC02 Final competion.PNG 1,358 × 766; 1.73 MB
EMC02 Final competion.PNG 1,358 × 766; 1.73 MB
 Safezone.png 135 × 228; 3 KB
Safezone.png 135 × 228; 3 KB
 DetectCrossing earlydeadend distances.jpg 653 × 382; 52 KB
DetectCrossing earlydeadend distances.jpg 653 × 382; 52 KB
 Case1.png 138 × 224; 4 KB
Case1.png 138 × 224; 4 KB
 Case3.png 166 × 225; 5 KB
Case3.png 166 × 225; 5 KB
 Case4.png 155 × 232; 5 KB
Case4.png 155 × 232; 5 KB
 Case2.png 151 × 225; 5 KB
Case2.png 151 × 225; 5 KB
 Gap location definition.png 1,000 × 500; 16 KB
Gap location definition.png 1,000 × 500; 16 KB
 Junctions2.png 897 × 1,438; 46 KB
Junctions2.png 897 × 1,438; 46 KB
 Img lines197.png 640 × 480; 391 KB
Img lines197.png 640 × 480; 391 KB
 Min distances.png 239 × 334; 8 KB
Min distances.png 239 × 334; 8 KB
 Margins.png 239 × 334; 9 KB
Margins.png 239 × 334; 9 KB
- Junction compet.pdf ; 28 KB
 Gaussian2.png 1,680 × 917; 53 KB
Gaussian2.png 1,680 × 917; 53 KB
 HexapodActuator.jpg 1,123 × 794; 62 KB
HexapodActuator.jpg 1,123 × 794; 62 KB
 HexapodSafety - 1.jpg 1,123 × 794; 116 KB
HexapodSafety - 1.jpg 1,123 × 794; 116 KB
 HexapodSafety.jpg 1,123 × 794; 116 KB
HexapodSafety.jpg 1,123 × 794; 116 KB
 HexapodEncoder - 1.jpg 1,123 × 794; 82 KB
HexapodEncoder - 1.jpg 1,123 × 794; 82 KB
 HexapodEncoder.jpg 1,123 × 794; 82 KB
HexapodEncoder.jpg 1,123 × 794; 82 KB
 JointError.jpg 1,123 × 794; 107 KB
JointError.jpg 1,123 × 794; 107 KB
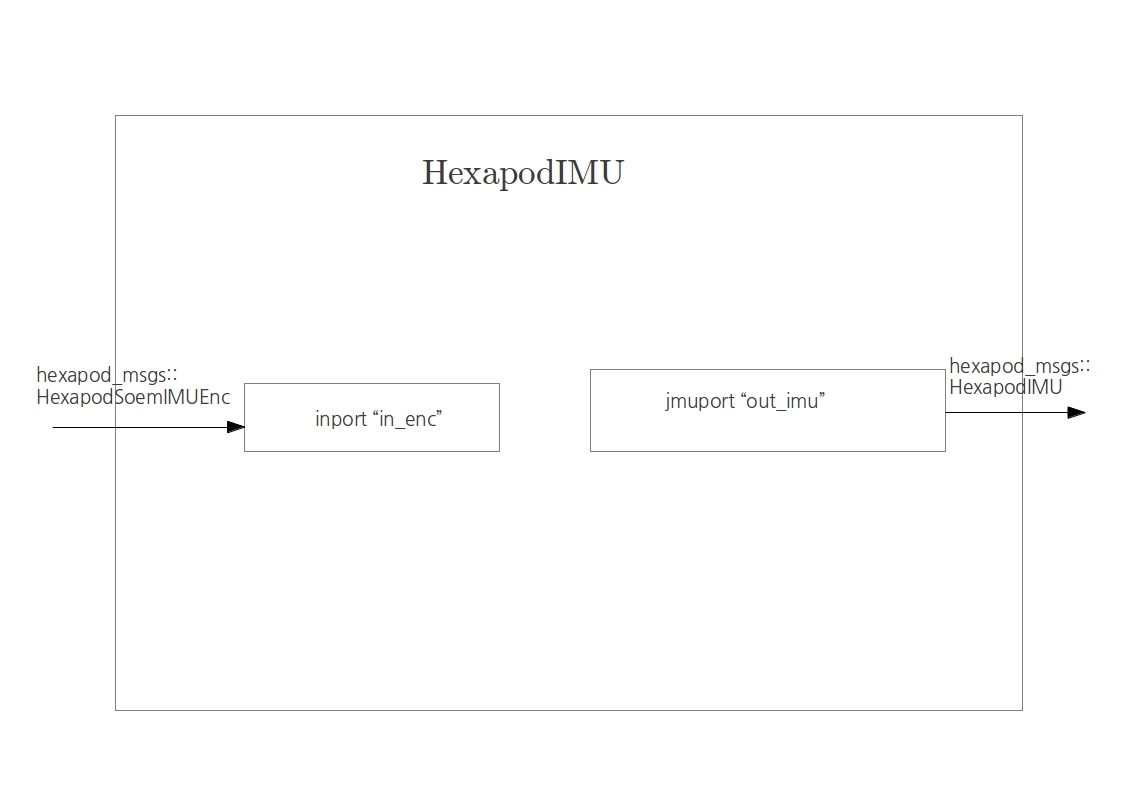 HexapodIMU - 1.jpg 1,123 × 794; 46 KB
HexapodIMU - 1.jpg 1,123 × 794; 46 KB
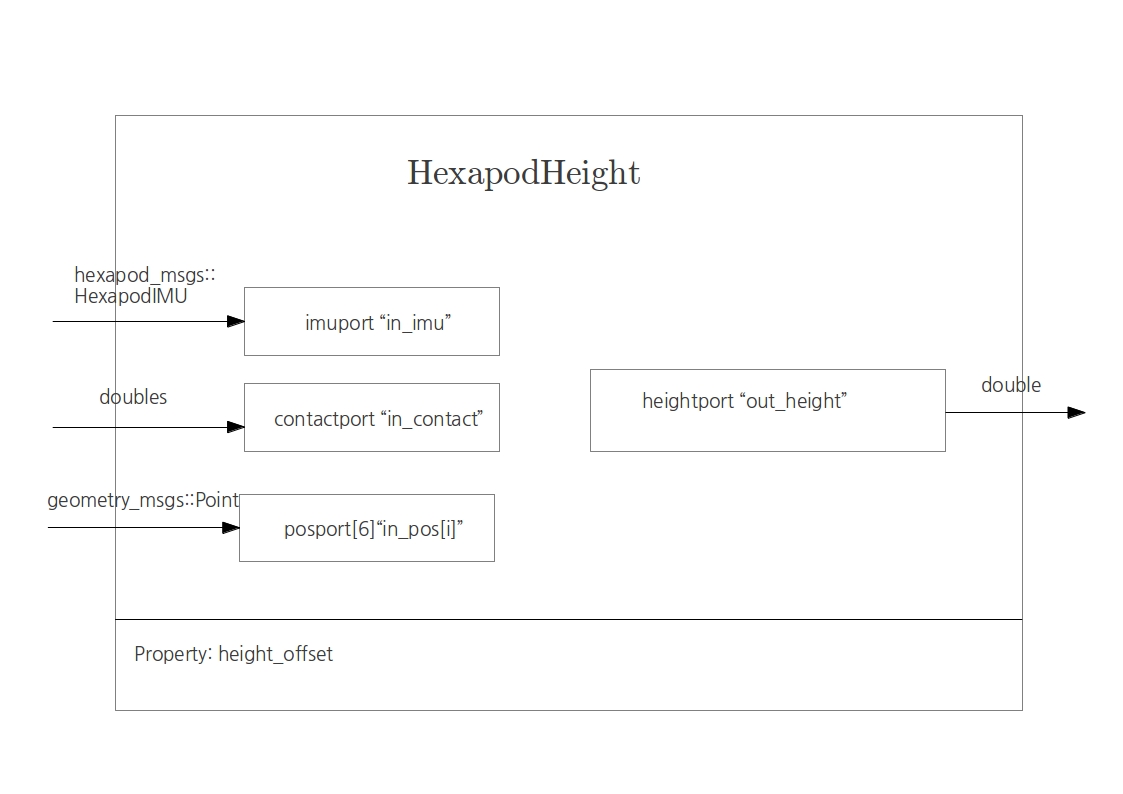 HexapodHeight - 1.jpg 1,123 × 794; 71 KB
HexapodHeight - 1.jpg 1,123 × 794; 71 KB
- Willems Hexapod 2011.pdf ; 6.06 MB
- FMBSGUI.pdf ; 598 KB
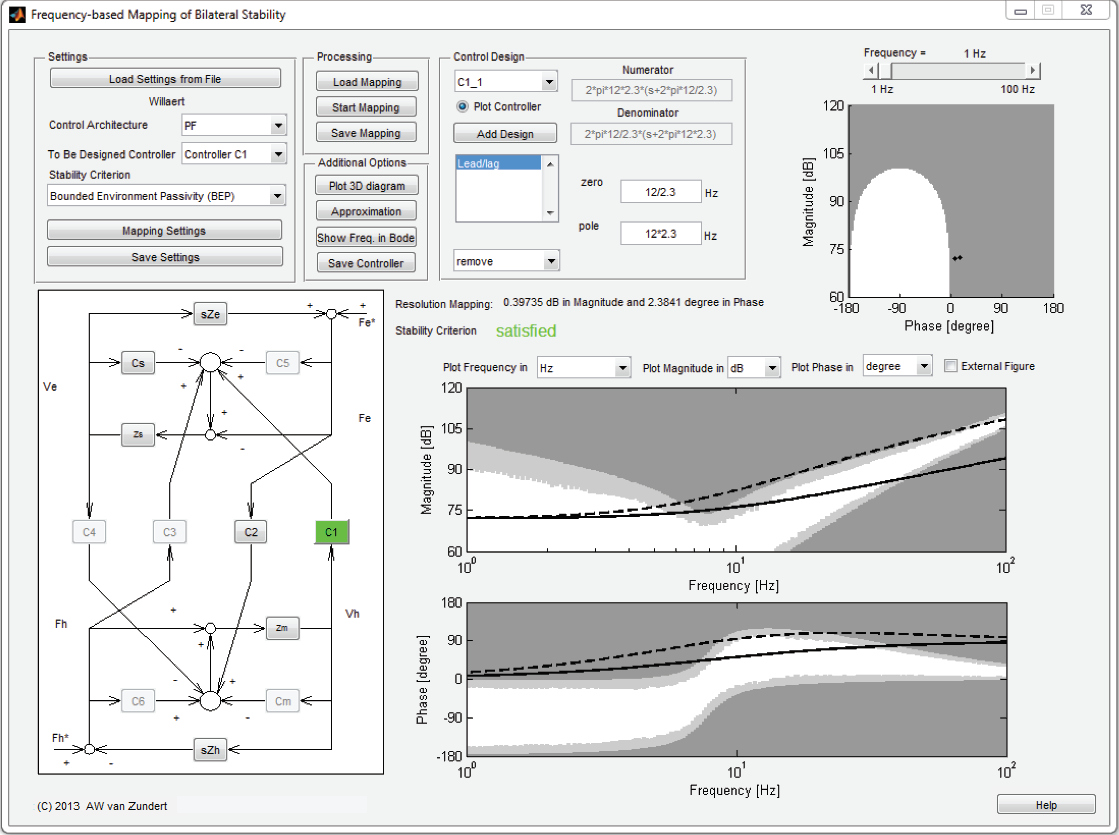 FMBSGUI.png 1,119 × 835; 144 KB
FMBSGUI.png 1,119 × 835; 144 KB
- FMBS tool.zip ; 7.21 MB
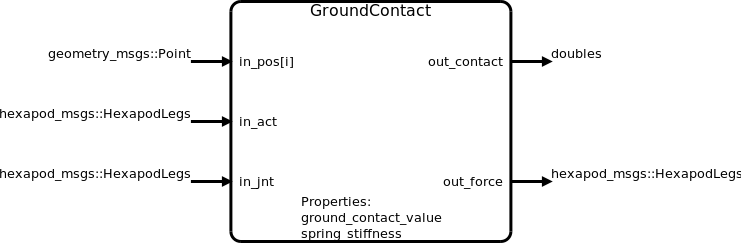 GroundContact.png 741 × 243; 15 KB
GroundContact.png 741 × 243; 15 KB
- Illustratie Directions.pdf ; 6.91 MB
- PickPlaceCasus.zip ; 26 KB
- Topicoverview.pdf ; 10 KB
 Topicoverview.png 1,100 × 1,053; 122 KB
Topicoverview.png 1,100 × 1,053; 122 KB
 R to -R.jpg 1,101 × 400; 19 KB
R to -R.jpg 1,101 × 400; 19 KB
- Corridor fout.pdf ; 12 KB
 Corridor fout.jpg 394 × 324; 16 KB
Corridor fout.jpg 394 × 324; 16 KB
 Corridor goed.jpg 394 × 324; 15 KB
Corridor goed.jpg 394 × 324; 15 KB
 Corridor multiple.jpg 394 × 326; 17 KB
Corridor multiple.jpg 394 × 326; 17 KB
 Corridor2Radii.gif 400 × 470; 157 KB
Corridor2Radii.gif 400 × 470; 157 KB
 Pico corridor rec.png 322 × 329; 4 KB
Pico corridor rec.png 322 × 329; 4 KB
 Software-architecture.png 1,305 × 1,081; 30 KB
Software-architecture.png 1,305 × 1,081; 30 KB
 EMC03-strategy.png 580 × 819; 38 KB
EMC03-strategy.png 580 × 819; 38 KB
- Corr 1.pdf ; 20 KB
 EMC05 program structure.png 960 × 426; 22 KB
EMC05 program structure.png 960 × 426; 22 KB
 Pico software design.png 1,674 × 717; 266 KB
Pico software design.png 1,674 × 717; 266 KB
 IMG-20140522-WA0000.jpg 800 × 600; 31 KB
IMG-20140522-WA0000.jpg 800 × 600; 31 KB
 Robustness.png 579 × 355; 17 KB
Robustness.png 579 × 355; 17 KB
 Recognition 1.png 852 × 341; 11 KB
Recognition 1.png 852 × 341; 11 KB
 Recognition 2.png 859 × 431; 12 KB
Recognition 2.png 859 × 431; 12 KB
 Recognition 3.png 836 × 270; 11 KB
Recognition 3.png 836 × 270; 11 KB
 Node Topic.png 775 × 553; 44 KB
Node Topic.png 775 × 553; 44 KB
 Crossing.png 396 × 442; 7 KB
Crossing.png 396 × 442; 7 KB
 Cornering.png 535 × 534; 14 KB
Cornering.png 535 × 534; 14 KB
 Line recognition.png 1,467 × 374; 13 KB
Line recognition.png 1,467 × 374; 13 KB
 Navigation protocol.jpg 1,121 × 561; 48 KB
Navigation protocol.jpg 1,121 × 561; 48 KB
 Gr08 straight normal.png 678 × 1,106; 16 KB
Gr08 straight normal.png 678 × 1,106; 16 KB
 Gr08 straight shifted.png 678 × 1,106; 19 KB
Gr08 straight shifted.png 678 × 1,106; 19 KB
 Gr08 straight turned.png 678 × 1,106; 36 KB
Gr08 straight turned.png 678 × 1,106; 36 KB
 Gr8 corner detection.png 1,680 × 1,050; 55 KB
Gr8 corner detection.png 1,680 × 1,050; 55 KB
 Detect T-junc 1.png 1,680 × 1,050; 54 KB
Detect T-junc 1.png 1,680 × 1,050; 54 KB
 Detect T-junc 2.png 1,680 × 1,050; 73 KB
Detect T-junc 2.png 1,680 × 1,050; 73 KB
 EMC05 Arrow.jpg 1,652 × 215; 23 KB
EMC05 Arrow.jpg 1,652 × 215; 23 KB
 Separator.png 256 × 256; 2 KB
Separator.png 256 × 256; 2 KB
 Overview tf movebase.png 1,413 × 578; 122 KB
Overview tf movebase.png 1,413 × 578; 122 KB
 Tf tree movebase.png 6,492 × 3,721; 499 KB
Tf tree movebase.png 6,492 × 3,721; 499 KB
 Tf tree movebase2.png 6,492 × 3,721; 499 KB
Tf tree movebase2.png 6,492 × 3,721; 499 KB
 Tftree.png 6,492 × 3,721; 499 KB
Tftree.png 6,492 × 3,721; 499 KB
 Tftree2.png 6,492 × 3,721; 499 KB
Tftree2.png 6,492 × 3,721; 499 KB
 Tftree movebase.png 6,492 × 3,721; 499 KB
Tftree movebase.png 6,492 × 3,721; 499 KB
 Strategy 08.gif 1,200 × 250; 130 KB
Strategy 08.gif 1,200 × 250; 130 KB
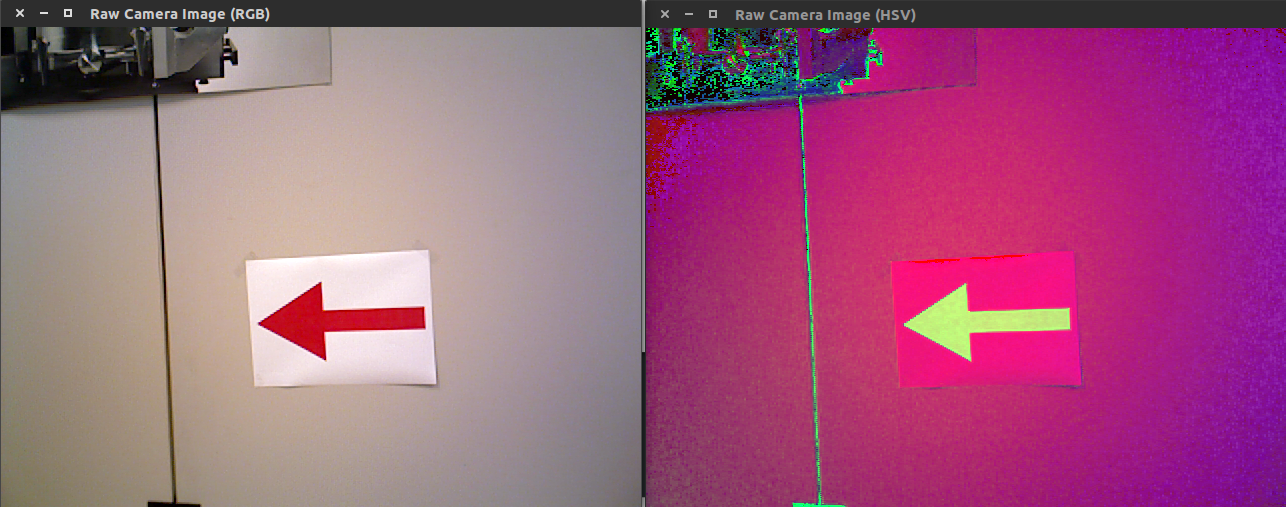
 Rgbtohsv.png 1,286 × 507; 804 KB
Rgbtohsv.png 1,286 × 507; 804 KB
 Rgbtohsv1.png 1,286 × 507; 804 KB
Rgbtohsv1.png 1,286 × 507; 804 KB
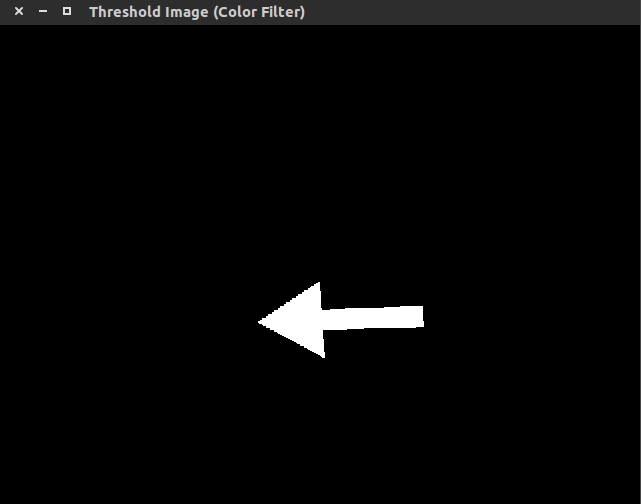 Inrange.png 641 × 504; 6 KB
Inrange.png 641 × 504; 6 KB
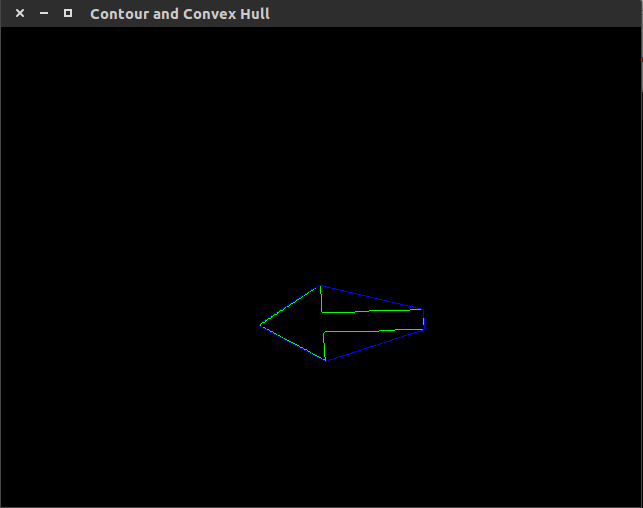 Convex.png 643 × 508; 6 KB
Convex.png 643 × 508; 6 KB
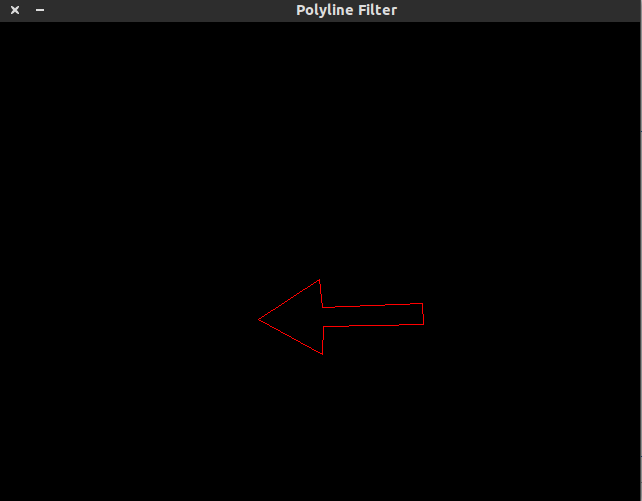 Polylines.png 642 × 501; 4 KB
Polylines.png 642 × 501; 4 KB
 Dist lines.png 1,322 × 806; 40 KB
Dist lines.png 1,322 × 806; 40 KB
 Rosgraph2.png 2,315 × 1,069; 269 KB
Rosgraph2.png 2,315 × 1,069; 269 KB
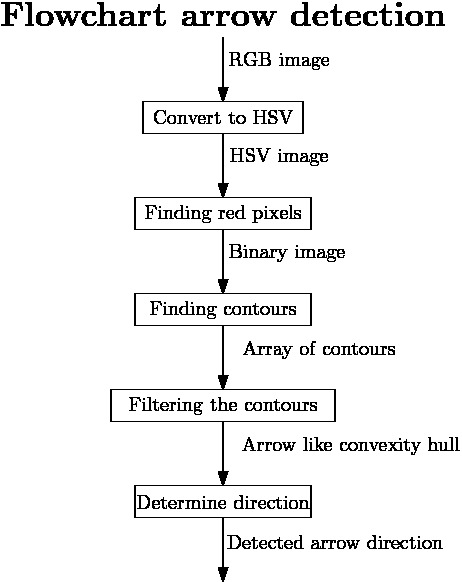 Flowchart arrow detection.jpg 462 × 582; 41 KB
Flowchart arrow detection.jpg 462 × 582; 41 KB
 Templatematch.png 1,208 × 622; 655 KB
Templatematch.png 1,208 × 622; 655 KB
 Edgedetection.png 1,439 × 890; 759 KB
Edgedetection.png 1,439 × 890; 759 KB
 EMC05 Program Architecture.jpg 429 × 391; 31 KB
EMC05 Program Architecture.jpg 429 × 391; 31 KB
 EMC05 Program Architecture v2.jpg 451 × 391; 32 KB
EMC05 Program Architecture v2.jpg 451 × 391; 32 KB
- Pico drive straight schuin.pdf ; 81 KB
 Pico drive straight schuin.png 153 × 291; 6 KB
Pico drive straight schuin.png 153 × 291; 6 KB
 Gr 08 Pico drive straight schuin 2.png 153 × 291; 7 KB
Gr 08 Pico drive straight schuin 2.png 153 × 291; 7 KB
 FLowchart.jpg 845 × 661; 71 KB
FLowchart.jpg 845 × 661; 71 KB
 FLowchart2.jpg 609 × 544; 53 KB
FLowchart2.jpg 609 × 544; 53 KB
 Turn12.jpg 700 × 503; 41 KB
Turn12.jpg 700 × 503; 41 KB
 Turn212.jpg 1,594 × 503; 47 KB
Turn212.jpg 1,594 × 503; 47 KB
 Flowchart6.jpg 900 × 464; 71 KB
Flowchart6.jpg 900 × 464; 71 KB
 Turnnew.jpg 616 × 282; 21 KB
Turnnew.jpg 616 × 282; 21 KB
- Schematic EMC.pdf ; 21 KB
 Rosgraph.png 2,536 × 470; 156 KB
Rosgraph.png 2,536 × 470; 156 KB
 Arrow hsv.jpg 640 × 480; 119 KB
Arrow hsv.jpg 640 × 480; 119 KB
 Arrow blurred.jpg 640 × 480; 7 KB
Arrow blurred.jpg 640 × 480; 7 KB
 Arrow contours.jpg 640 × 480; 9 KB
Arrow contours.jpg 640 × 480; 9 KB
 Arrow largestcontour.jpg 640 × 480; 12 KB
Arrow largestcontour.jpg 640 × 480; 12 KB
 Arrow leftright.jpg 640 × 480; 15 KB
Arrow leftright.jpg 640 × 480; 15 KB
 Arrow tresholded.jpg 640 × 480; 8 KB
Arrow tresholded.jpg 640 × 480; 8 KB
 Arrowfar.png 1,215 × 910; 724 KB
Arrowfar.png 1,215 × 910; 724 KB
 Arrow hsv (1).jpg 1,215 × 910; 427 KB
Arrow hsv (1).jpg 1,215 × 910; 427 KB
 Arrow tresholded (1).jpg 1,215 × 910; 16 KB
Arrow tresholded (1).jpg 1,215 × 910; 16 KB
 Arrow blurred (1).jpg 1,215 × 910; 15 KB
Arrow blurred (1).jpg 1,215 × 910; 15 KB
 Arrow contours (1).jpg 1,215 × 910; 22 KB
Arrow contours (1).jpg 1,215 × 910; 22 KB
 Arrow largestcontour (1).jpg 1,215 × 910; 23 KB
Arrow largestcontour (1).jpg 1,215 × 910; 23 KB
 Pfm.png 745 × 1,053; 40 KB
Pfm.png 745 × 1,053; 40 KB
 PlaatjeMoveBase.png 803 × 419; 101 KB
PlaatjeMoveBase.png 803 × 419; 101 KB
 Flowchart7.jpg 1,302 × 638; 118 KB
Flowchart7.jpg 1,302 × 638; 118 KB
 EMC07 step 1 2 3.png 614 × 432; 38 KB
EMC07 step 1 2 3.png 614 × 432; 38 KB
 EMC07 step 3 4.png 648 × 259; 23 KB
EMC07 step 3 4.png 648 × 259; 23 KB
 Step 5.png 319 × 269; 6 KB
Step 5.png 319 × 269; 6 KB
- EMC01 2014 FSM Final.pdf ; 92 KB
 EMC01 2014 FSM Final2.png 1,097 × 592; 63 KB
EMC01 2014 FSM Final2.png 1,097 × 592; 63 KB
 Screenshot 2014-06-01-21-51-48.png 1,280 × 628; 64 KB
Screenshot 2014-06-01-21-51-48.png 1,280 × 628; 64 KB
 Flowhighlevel.jpg 1,600 × 900; 186 KB
Flowhighlevel.jpg 1,600 × 900; 186 KB
 Flowhighlevel2.jpg 1,600 × 900; 190 KB
Flowhighlevel2.jpg 1,600 × 900; 190 KB
 Emc flow.png 1,200 × 4,046; 86 KB
Emc flow.png 1,200 × 4,046; 86 KB
 Potential path.gif 1,200 × 500; 577 KB
Potential path.gif 1,200 × 500; 577 KB
 Alle camera pics in row group06.png 263 × 1,392; 190 KB
Alle camera pics in row group06.png 263 × 1,392; 190 KB
 Arrow25.jpg 968 × 544; 23 KB
Arrow25.jpg 968 × 544; 23 KB
 Ccmap.jpg 500 × 508; 38 KB
Ccmap.jpg 500 × 508; 38 KB
 Schematic EMC.jpg 868 × 625; 41 KB
Schematic EMC.jpg 868 × 625; 41 KB
 Picture1 EMC07.png 242 × 196; 2 KB
Picture1 EMC07.png 242 × 196; 2 KB
 Fig2 EMC07.png 287 × 231; 9 KB
Fig2 EMC07.png 287 × 231; 9 KB
 Fig5 EMC07.png 282 × 221; 3 KB
Fig5 EMC07.png 282 × 221; 3 KB
 Fig4 EMC07.png 305 × 234; 9 KB
Fig4 EMC07.png 305 × 234; 9 KB
 Fig3 EMC07.png 275 × 201; 9 KB
Fig3 EMC07.png 275 × 201; 9 KB
 Pico excellent.png 1,219 × 617; 123 KB
Pico excellent.png 1,219 × 617; 123 KB
 EMC history.jpg 2,553 × 2,137; 256 KB
EMC history.jpg 2,553 × 2,137; 256 KB
 Schematic EMC0123.JPG 1,173 × 842; 49 KB
Schematic EMC0123.JPG 1,173 × 842; 49 KB
 Picoquads.png 379 × 526; 19 KB
Picoquads.png 379 × 526; 19 KB
 EMC12 Graph 2.png 612 × 504; 21 KB
EMC12 Graph 2.png 612 × 504; 21 KB
 High level dec.jpg 543 × 553; 40 KB
High level dec.jpg 543 × 553; 40 KB
 Case node2.png 700 × 700; 7 KB
Case node2.png 700 × 700; 7 KB
 Base safetyWIKI.png 391 × 398; 22 KB
Base safetyWIKI.png 391 × 398; 22 KB
 1222.png 500 × 500; 2 KB
1222.png 500 × 500; 2 KB
 1223.png 500 × 500; 2 KB
1223.png 500 × 500; 2 KB
 1224.png 500 × 500; 1 KB
1224.png 500 × 500; 1 KB
 1225.png 500 × 500; 1 KB
1225.png 500 × 500; 1 KB
 1226.png 500 × 500; 1 KB
1226.png 500 × 500; 1 KB
 1227.png 500 × 500; 6 KB
1227.png 500 × 500; 6 KB
 1228.png 1,000 × 1,000; 31 KB
1228.png 1,000 × 1,000; 31 KB
 EMC12 Line2point.png 799 × 322; 14 KB
EMC12 Line2point.png 799 × 322; 14 KB
 Drive6.png 767 × 753; 10 KB
Drive6.png 767 × 753; 10 KB
 Schematic EMC01232.JPG 1,167 × 842; 49 KB
Schematic EMC01232.JPG 1,167 × 842; 49 KB
 Drawing3.jpg 234 × 385; 9 KB
Drawing3.jpg 234 × 385; 9 KB
 Gmap07.gif 485 × 331; 32 KB
Gmap07.gif 485 × 331; 32 KB
 Filmintro corridor.jpg 1,600 × 896; 396 KB
Filmintro corridor.jpg 1,600 × 896; 396 KB
 Filmintro3.jpg 1,600 × 896; 369 KB
Filmintro3.jpg 1,600 × 896; 369 KB
 Filmintro simulation.jpg 1,492 × 836; 205 KB
Filmintro simulation.jpg 1,492 × 836; 205 KB
 Filmintro maze.jpg 1,600 × 896; 437 KB
Filmintro maze.jpg 1,600 × 896; 437 KB
 PlaatjeMoveBase1.png 903 × 485; 159 KB
PlaatjeMoveBase1.png 903 × 485; 159 KB
 Maze Tree Animation EMC 04.gif 892 × 403; 802 KB
Maze Tree Animation EMC 04.gif 892 × 403; 802 KB
 Decision flowchart.png 1,250 × 1,486; 76 KB
Decision flowchart.png 1,250 × 1,486; 76 KB
 EMC04 program overview.png 2,471 × 1,730; 129 KB
EMC04 program overview.png 2,471 × 1,730; 129 KB
- Time survey 4K450 EMC10.zip ; 11 KB
 Robot1.jpg 307 × 180; 13 KB
Robot1.jpg 307 × 180; 13 KB
 Robot2.jpg 401 × 385; 30 KB
Robot2.jpg 401 × 385; 30 KB
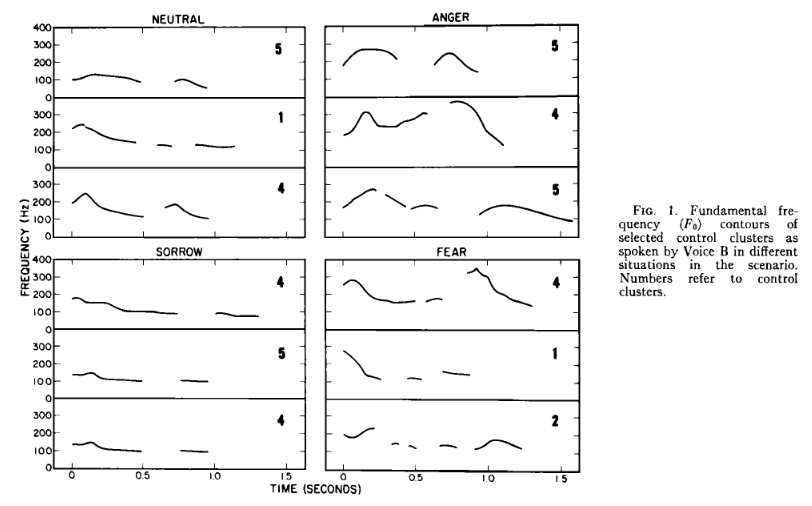 Artikel 1 F0.png 812 × 506; 53 KB
Artikel 1 F0.png 812 × 506; 53 KB
 Knipsel.JPG 541 × 201; 34 KB
Knipsel.JPG 541 × 201; 34 KB
 2014-09-27 20.44.19.jpg 3,264 × 1,836; 2.25 MB
2014-09-27 20.44.19.jpg 3,264 × 1,836; 2.25 MB
- Health exercises with an avatar.pdf ; 5.17 MB
 Group1-KS-Opening-ConceptSketch.jpg 3,264 × 1,836; 1.94 MB
Group1-KS-Opening-ConceptSketch.jpg 3,264 × 1,836; 1.94 MB
 Dik1.gif 335 × 400; 52 KB
Dik1.gif 335 × 400; 52 KB
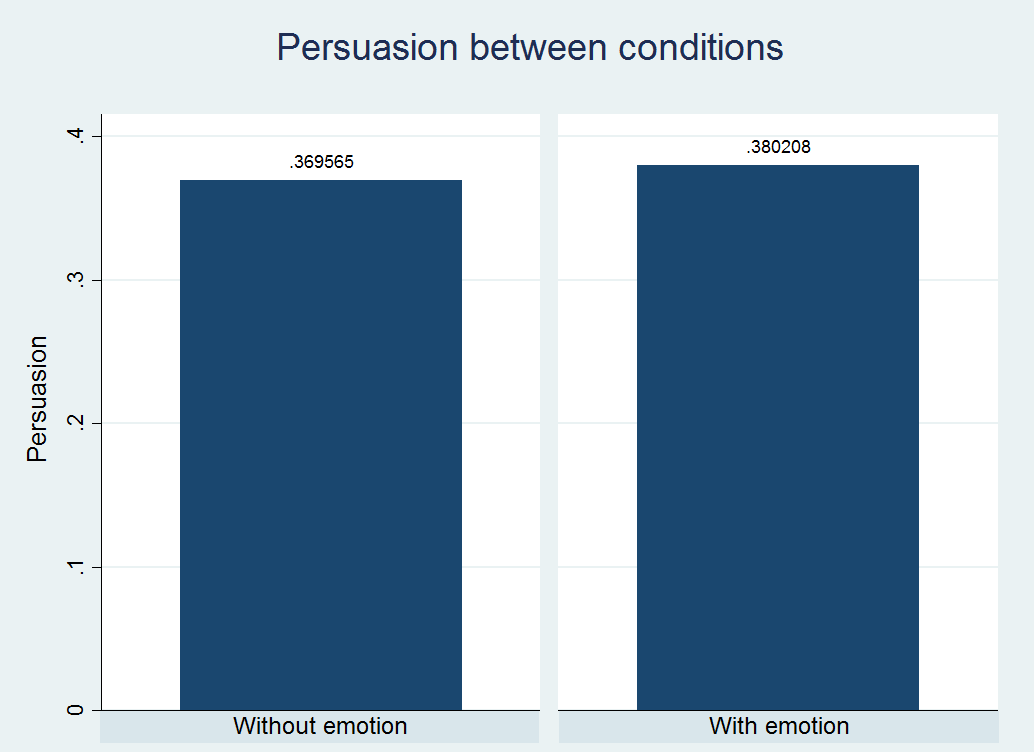 Graph bar persuasion.png 1,034 × 752; 39 KB
Graph bar persuasion.png 1,034 × 752; 39 KB
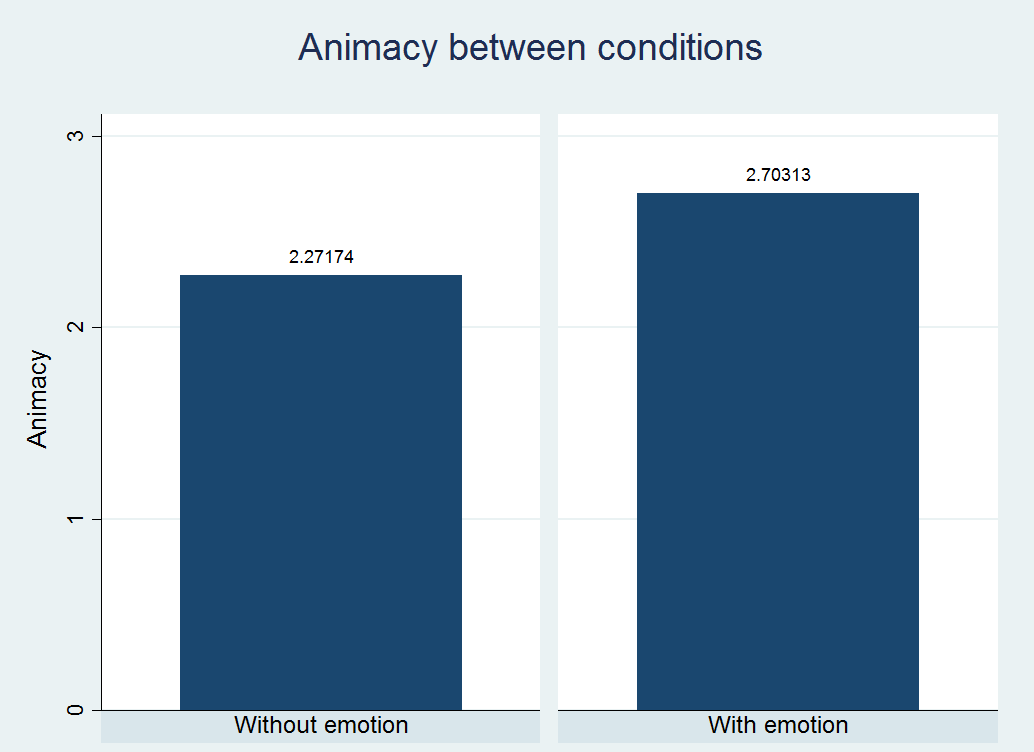 Graph bar animacy.png 1,034 × 752; 39 KB
Graph bar animacy.png 1,034 × 752; 39 KB
- Here.pdf ; 90 KB
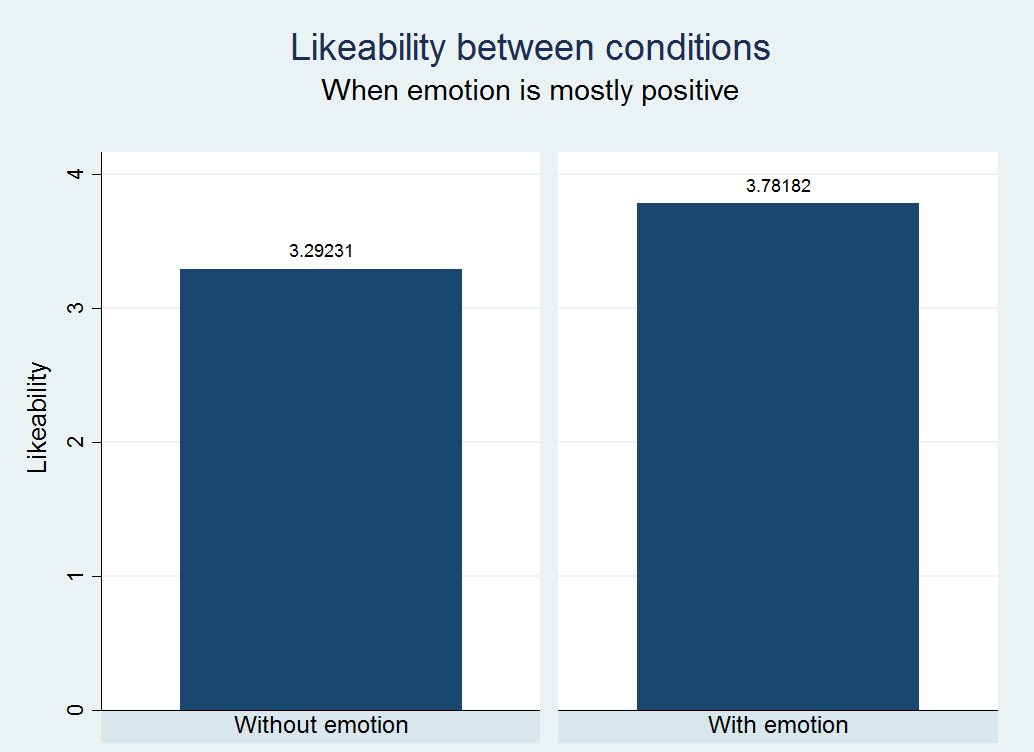 Graph bar likeability when emotion is mostly positive.png 1,034 × 752; 41 KB
Graph bar likeability when emotion is mostly positive.png 1,034 × 752; 41 KB
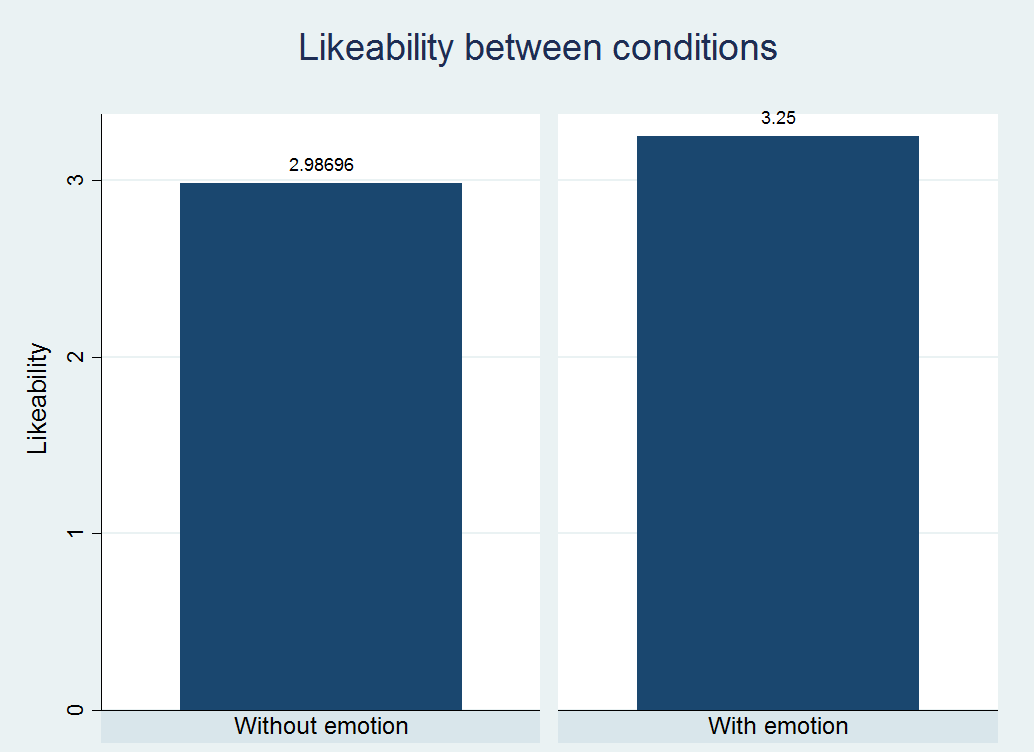 Graph bar likeability.png 1,034 × 752; 28 KB
Graph bar likeability.png 1,034 × 752; 28 KB
 Rond.jpg 468 × 351; 42 KB
Rond.jpg 468 × 351; 42 KB
- Dhl trend report uav.pdf ; 5.43 MB
 RIFD-1000m2.png 561 × 420; 37 KB
RIFD-1000m2.png 561 × 420; 37 KB
 RIFD-1000m2b.png 561 × 420; 5 KB
RIFD-1000m2b.png 561 × 420; 5 KB
 ChangingSettings.jpg 2,580 × 1,480; 878 KB
ChangingSettings.jpg 2,580 × 1,480; 878 KB
 Menu.jpg 2,582 × 1,937; 1.77 MB
Menu.jpg 2,582 × 1,937; 1.77 MB
 Embedded motion control interfaces.jpg 1,009 × 689; 59 KB
Embedded motion control interfaces.jpg 1,009 × 689; 59 KB
- Group list.pdf ; 193 KB
- Flow chart.pdf ; 56 KB
 Components.png 790 × 477; 68 KB
Components.png 790 × 477; 68 KB
 Corridorlayout.png 691 × 154; 2 KB
Corridorlayout.png 691 × 154; 2 KB
 Block Diagram.jpg 1,280 × 720; 62 KB
Block Diagram.jpg 1,280 × 720; 62 KB
- Functions.pdf ; 21 KB
 Functions.png 2,109 × 350; 44 KB
Functions.png 2,109 × 350; 44 KB
 Compositionpattern.png 883 × 587; 241 KB
Compositionpattern.png 883 × 587; 241 KB
 Picture1.png 934 × 668; 73 KB
Picture1.png 934 × 668; 73 KB
 Composition Pattern.jpg 1,057 × 717; 142 KB
Composition Pattern.jpg 1,057 × 717; 142 KB
 Avoidance.png 2,062 × 2,065; 55 KB
Avoidance.png 2,062 × 2,065; 55 KB
 Movement.png 2,062 × 2,065; 55 KB
Movement.png 2,062 × 2,065; 55 KB
- Design architecture group1.pdf ; 38 KB
- Emc03 wayfindingCP1.pdf ; 24 KB
 CompositionpatternV3.png 1,052 × 744; 156 KB
CompositionpatternV3.png 1,052 × 744; 156 KB
 Compositionpattern V2.png 2,845 × 2,134; 233 KB
Compositionpattern V2.png 2,845 × 2,134; 233 KB
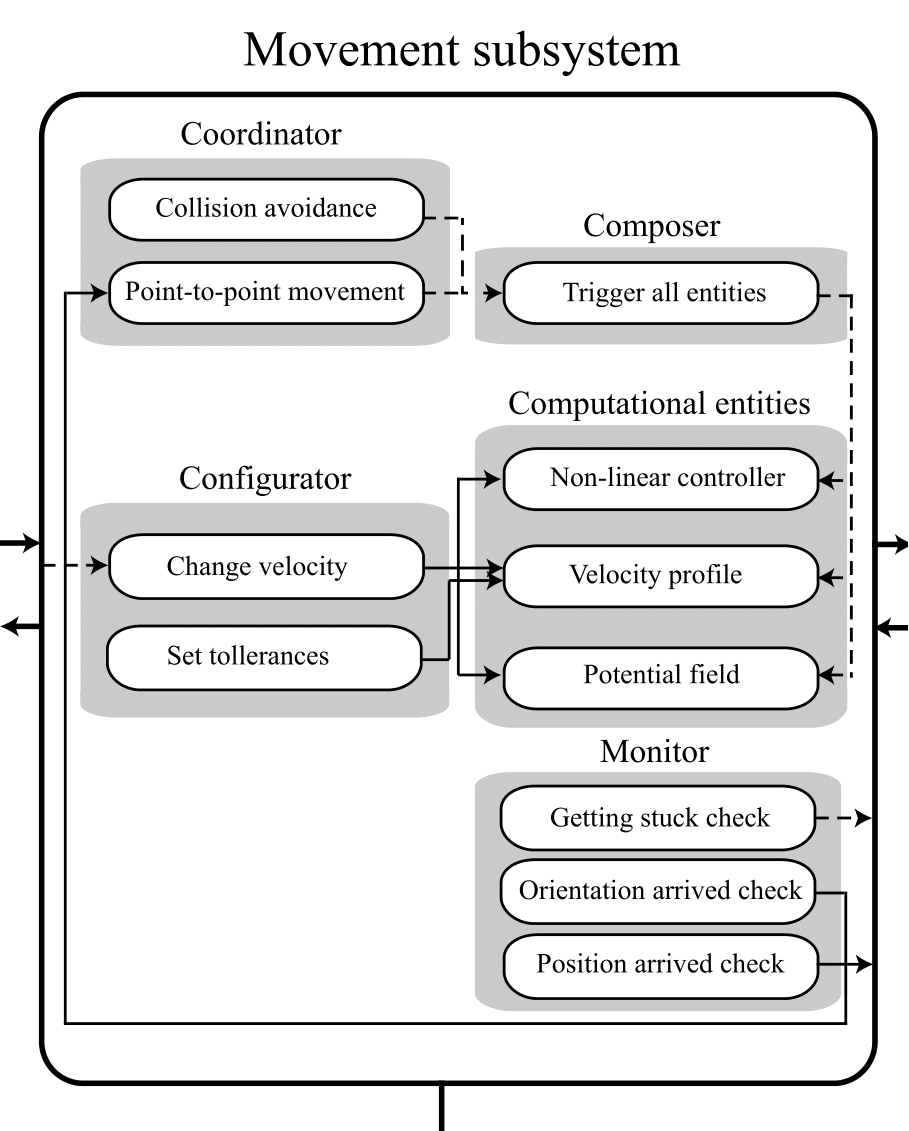 Movement subsystem.png 909 × 1,131; 78 KB
Movement subsystem.png 909 × 1,131; 78 KB
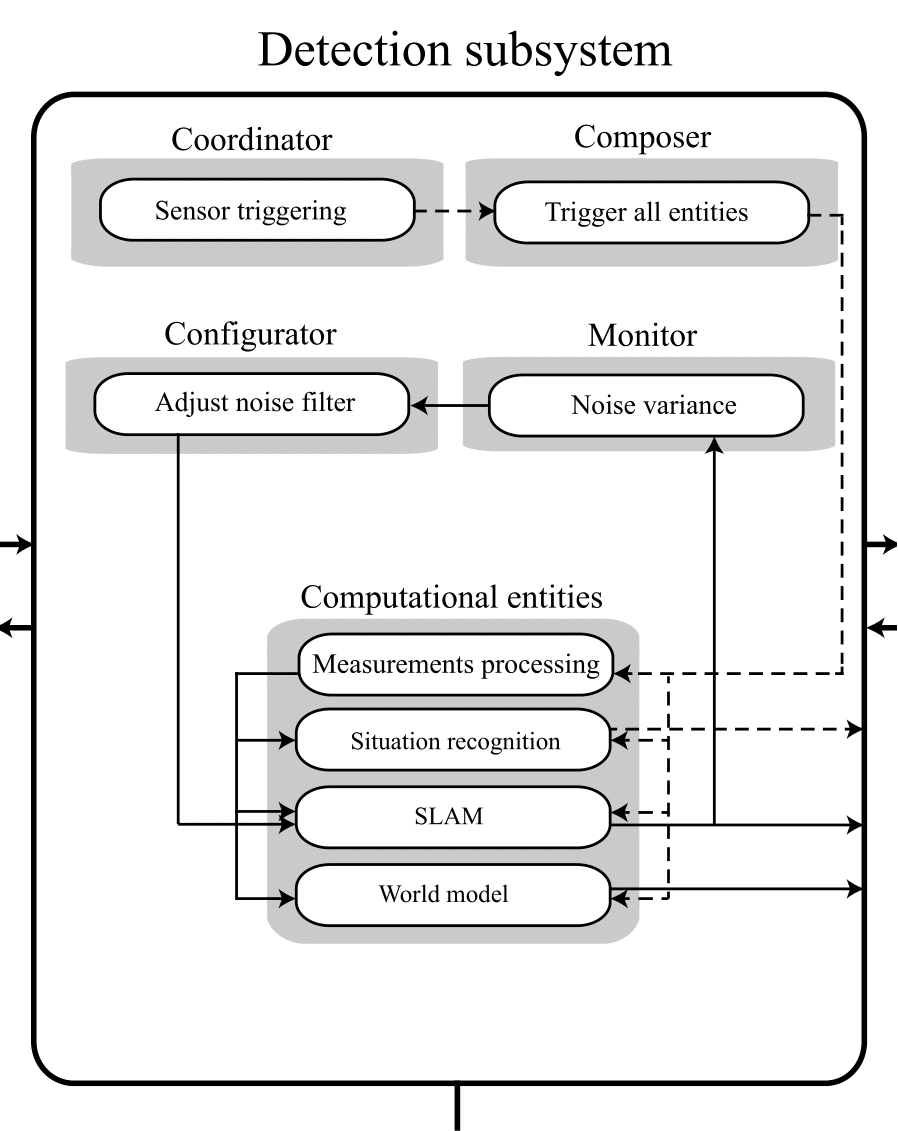 Detection subsystem.png 898 × 1,131; 59 KB
Detection subsystem.png 898 × 1,131; 59 KB
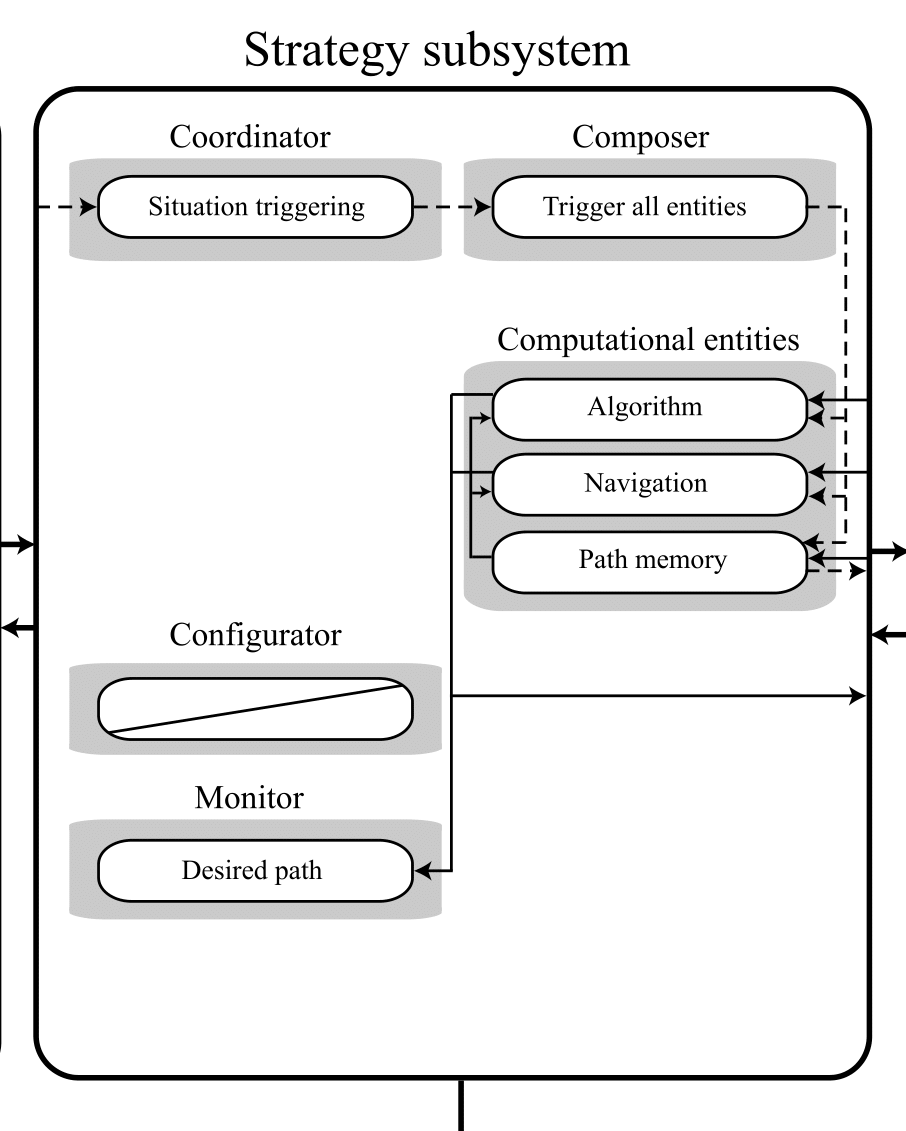 Strategy subsystem.png 906 × 1,131; 53 KB
Strategy subsystem.png 906 × 1,131; 53 KB
 SLAM landmarks.png 1,075 × 537; 9 KB
SLAM landmarks.png 1,075 × 537; 9 KB
 SLAM Initialsituation.png 1,075 × 495; 13 KB
SLAM Initialsituation.png 1,075 × 495; 13 KB
 SLAM exactsituation.png 1,075 × 495; 13 KB
SLAM exactsituation.png 1,075 × 495; 13 KB
- General Framework.pdf ; 20 KB
- Drive Function Block.pdf ; 20 KB
- Corridor Turn.pdf ; 28 KB
- Corridor start.pdf ; 28 KB
 General Framework.jpg 1,675 × 1,267; 169 KB
General Framework.jpg 1,675 × 1,267; 169 KB
 Drivescanmapdec.png 1,172 × 626; 25 KB
Drivescanmapdec.png 1,172 × 626; 25 KB
 Cpdrive.png 1,004 × 789; 42 KB
Cpdrive.png 1,004 × 789; 42 KB
 Turningpath.png 638 × 399; 7 KB
Turningpath.png 638 × 399; 7 KB
 TakeTurn.png 250 × 317; 10 KB
TakeTurn.png 250 × 317; 10 KB
 CompositionPatternHierarchy.jpg 889 × 527; 49 KB
CompositionPatternHierarchy.jpg 889 × 527; 49 KB
 WP 20150521 001.jpg 2,448 × 3,264; 2.18 MB
WP 20150521 001.jpg 2,448 × 3,264; 2.18 MB
 Maze 1 EMC 01.png 1,114 × 1,039; 37 KB
Maze 1 EMC 01.png 1,114 × 1,039; 37 KB
 Maze 2 Loops EMC 01.png 1,049 × 1,039; 53 KB
Maze 2 Loops EMC 01.png 1,049 × 1,039; 53 KB
 Blockdia.PNG 983 × 533; 53 KB
Blockdia.PNG 983 × 533; 53 KB
 Vector zicht.png 858 × 768; 11 KB
Vector zicht.png 858 × 768; 11 KB
 Compositionpattern V11.png 2,845 × 1,878; 234 KB
Compositionpattern V11.png 2,845 × 1,878; 234 KB
- 4K450P1.pdf ; 320 KB
- EMC P2 V2.pdf ; 1.11 MB
 Virtualwalls.png 537 × 510; 9 KB
Virtualwalls.png 537 × 510; 9 KB
 Picture1.jpg 1,295 × 963; 100 KB
Picture1.jpg 1,295 × 963; 100 KB
 Coordinate & Navigation.png 1,270 × 653; 146 KB
Coordinate & Navigation.png 1,270 × 653; 146 KB
 Maze gif table.gif 1,250 × 430; 111 KB
Maze gif table.gif 1,250 × 430; 111 KB
 Junction detection 002.png 964 × 964; 30 KB
Junction detection 002.png 964 × 964; 30 KB
 Wall and Open Spaces.png 800 × 600; 7 KB
Wall and Open Spaces.png 800 × 600; 7 KB
 Open Space, Gross and Thin Walls.png 1,600 × 1,200; 18 KB
Open Space, Gross and Thin Walls.png 1,600 × 1,200; 18 KB
 Ultimate Maze.png 1,600 × 1,200; 36 KB
Ultimate Maze.png 1,600 × 1,200; 36 KB
 Picture1.gif 422 × 149; 5 KB
Picture1.gif 422 × 149; 5 KB
 Maze1.jpg 569 × 504; 36 KB
Maze1.jpg 569 × 504; 36 KB
 Edited Maze.jpg 569 × 504; 36 KB
Edited Maze.jpg 569 × 504; 36 KB
 Manoeuvring 1.jpg 830 × 554; 22 KB
Manoeuvring 1.jpg 830 × 554; 22 KB
 Maze Challenge.png 1,600 × 1,200; 9 KB
Maze Challenge.png 1,600 × 1,200; 9 KB
 State Decision Flow.png 562 × 1,192; 93 KB
State Decision Flow.png 562 × 1,192; 93 KB
 Maze Challenge(new).png 800 × 600; 3 KB
Maze Challenge(new).png 800 × 600; 3 KB
 Edge detection.png 881 × 669; 22 KB
Edge detection.png 881 × 669; 22 KB
 SlamResults.gif 800 × 480; 2.14 MB
SlamResults.gif 800 × 480; 2.14 MB
 SlamResultsGroup7.gif 800 × 464; 2.48 MB
SlamResultsGroup7.gif 800 × 464; 2.48 MB
 Deadendtest3.png 350 × 360; 1 KB
Deadendtest3.png 350 × 360; 1 KB
 Det3op.gif 1,104 × 624; 6.84 MB
Det3op.gif 1,104 × 624; 6.84 MB
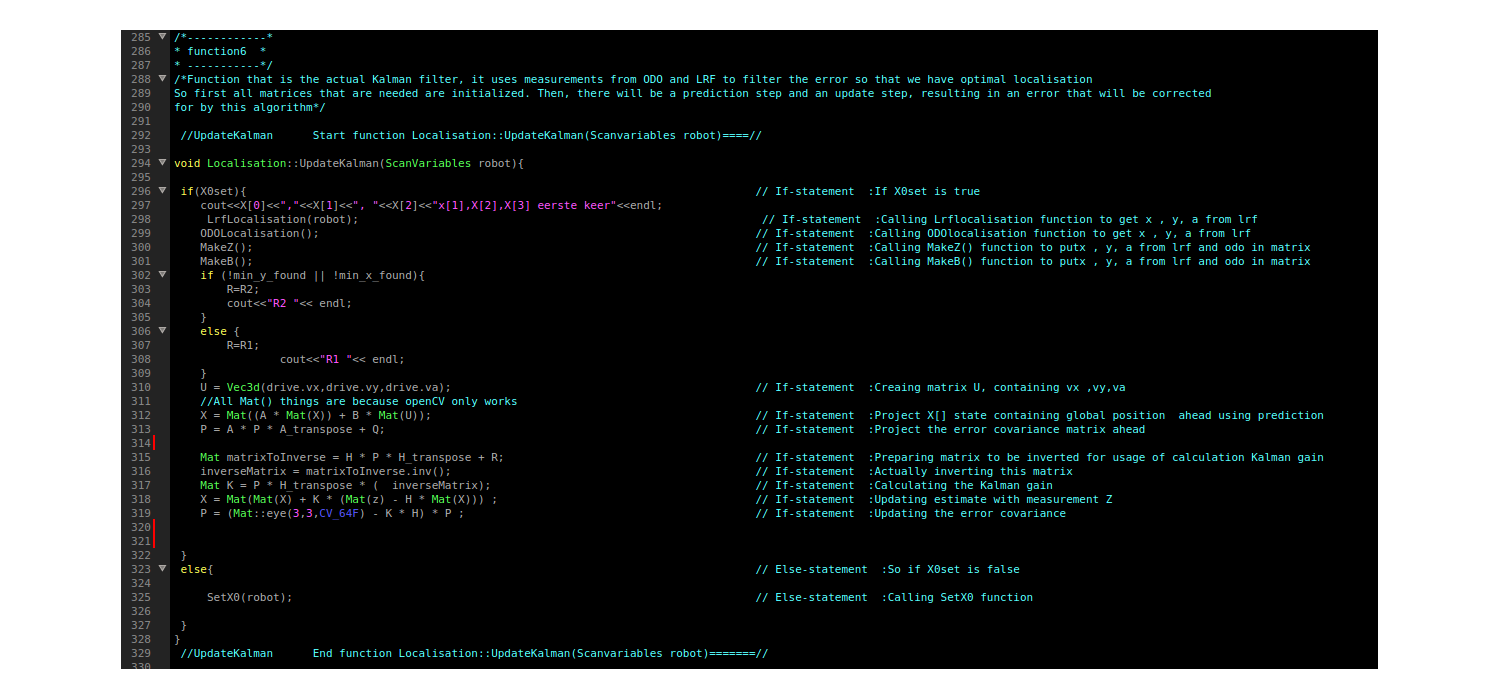 Function6wiki.png 1,500 × 700; 180 KB
Function6wiki.png 1,500 × 700; 180 KB
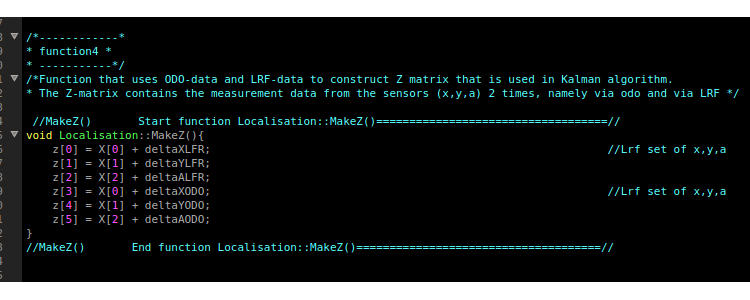 Function4wiki.png 750 × 300; 45 KB
Function4wiki.png 750 × 300; 45 KB
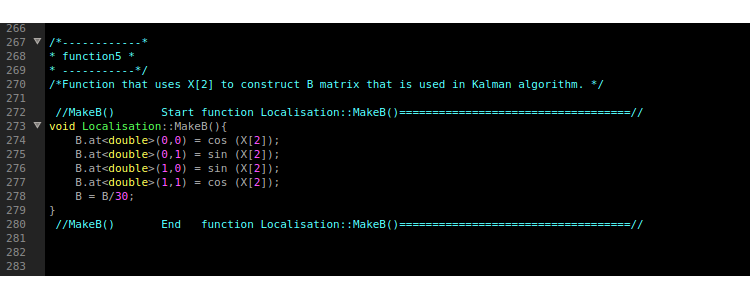 Function5wiki.png 750 × 300; 42 KB
Function5wiki.png 750 × 300; 42 KB
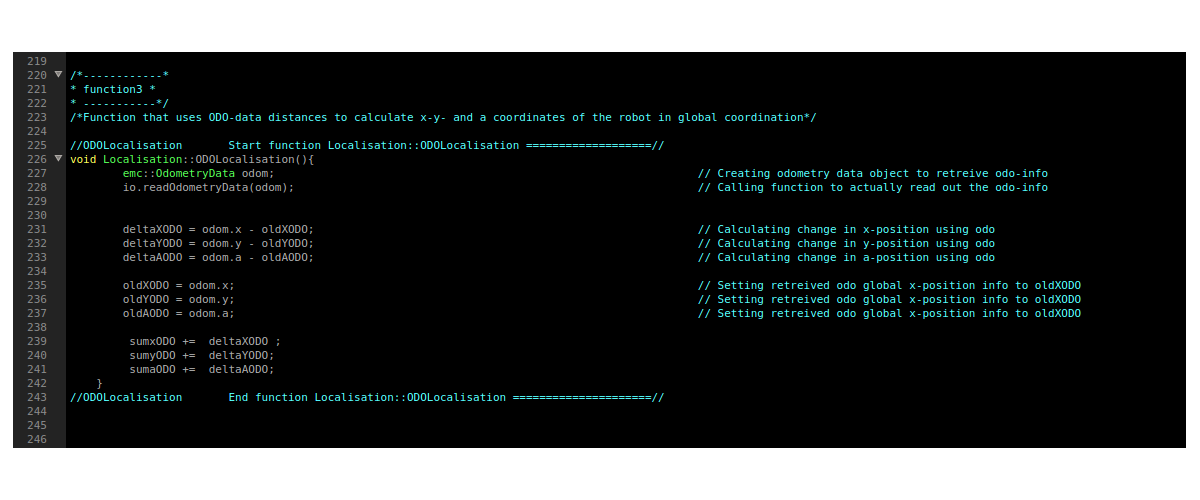 Function3wiki.png 1,200 × 500; 93 KB
Function3wiki.png 1,200 × 500; 93 KB
 COMPHFINAL.jpg 638 × 734; 64 KB
COMPHFINAL.jpg 638 × 734; 64 KB
 Potfield.jpg 873 × 807; 111 KB
Potfield.jpg 873 × 807; 111 KB
- Tjunction.pdf ; 768 KB
- Turn.pdf ; 771 KB
- Tjunction2.pdf ; 772 KB
- Deadend.pdf ; 771 KB
 Tjunction2.jpg 275 × 267; 558 KB
Tjunction2.jpg 275 × 267; 558 KB
 Turn.jpg 182 × 273; 557 KB
Turn.jpg 182 × 273; 557 KB
 Tjunction.jpg 182 × 363; 557 KB
Tjunction.jpg 182 × 363; 557 KB
 08 Deadend.jpg 80 × 191; 555 KB
08 Deadend.jpg 80 × 191; 555 KB
 Flow Diagram.png 1,189 × 757; 90 KB
Flow Diagram.png 1,189 × 757; 90 KB
 Orientationtracking.png 173 × 314; 8 KB
Orientationtracking.png 173 × 314; 8 KB
- Association.pdf ; 3 KB
 Explaning formula.png 617 × 512; 8 KB
Explaning formula.png 617 × 512; 8 KB
 IMAGE 3 - Find the Gap 2.JPG 555 × 835; 33 KB
IMAGE 3 - Find the Gap 2.JPG 555 × 835; 33 KB
 IMAGE 4 - Find the Gap 3.JPG 557 × 837; 27 KB
IMAGE 4 - Find the Gap 3.JPG 557 × 837; 27 KB
 Pico.jpg 275 × 341; 17 KB
Pico.jpg 275 × 341; 17 KB
 Components image.JPG 1,345 × 583; 85 KB
Components image.JPG 1,345 × 583; 85 KB
 2.png 887 × 718; 136 KB
2.png 887 × 718; 136 KB
 0LAUK0 2015 01 Design Report Introduction Shortcut.jpg 216 × 291; 19 KB
0LAUK0 2015 01 Design Report Introduction Shortcut.jpg 216 × 291; 19 KB
 Busroute.png 866 × 3,246; 123 KB
Busroute.png 866 × 3,246; 123 KB
 Layout save button.png 4,592 × 2,428; 306 KB
Layout save button.png 4,592 × 2,428; 306 KB
 Camera opstelling.png 493 × 377; 50 KB
Camera opstelling.png 493 × 377; 50 KB
- Peters CST2015.061.pdf ; 5.33 MB
 Positie bepaling situatie2.png 463 × 461; 10 KB
Positie bepaling situatie2.png 463 × 461; 10 KB
 Speelveld.jpg 653 × 418; 29 KB
Speelveld.jpg 653 × 418; 29 KB
 Swarm.png 960 × 305; 274 KB
Swarm.png 960 × 305; 274 KB
 Basic model mindstorm.jpg 1,836 × 3,264; 916 KB
Basic model mindstorm.jpg 1,836 × 3,264; 916 KB
 Object tracking.png 1,049 × 549; 704 KB
Object tracking.png 1,049 × 549; 704 KB
 Beeldtopcam.PNG 1,630 × 934; 1,016 KB
Beeldtopcam.PNG 1,630 × 934; 1,016 KB
 Opjecttracking.png 1,049 × 549; 704 KB
Opjecttracking.png 1,049 × 549; 704 KB
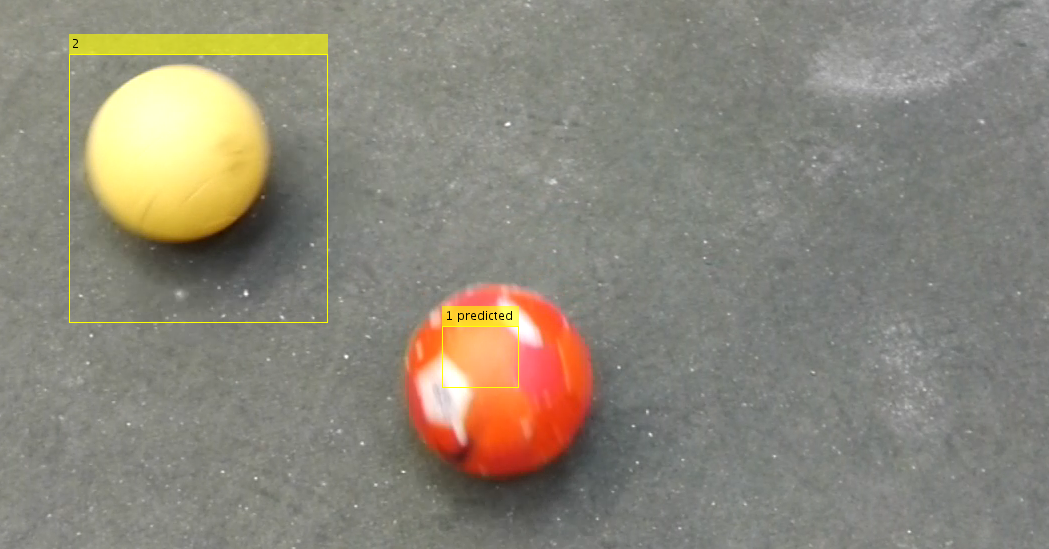 Objecttracking.png 1,049 × 549; 704 KB
Objecttracking.png 1,049 × 549; 704 KB
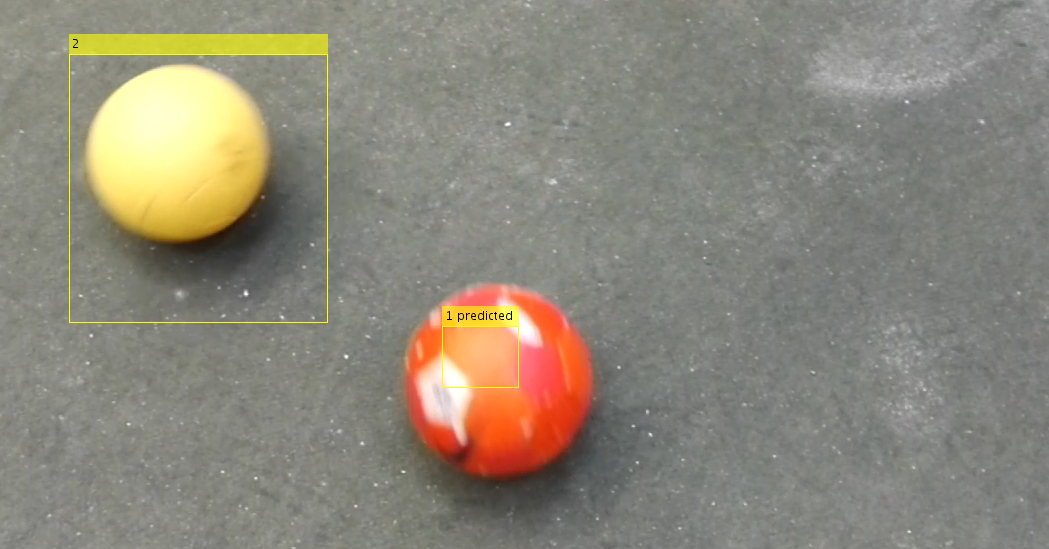 Paths.png 1,049 × 549; 704 KB
Paths.png 1,049 × 549; 704 KB
 Collision detection.gif 480 × 334; 4.18 MB
Collision detection.gif 480 × 334; 4.18 MB
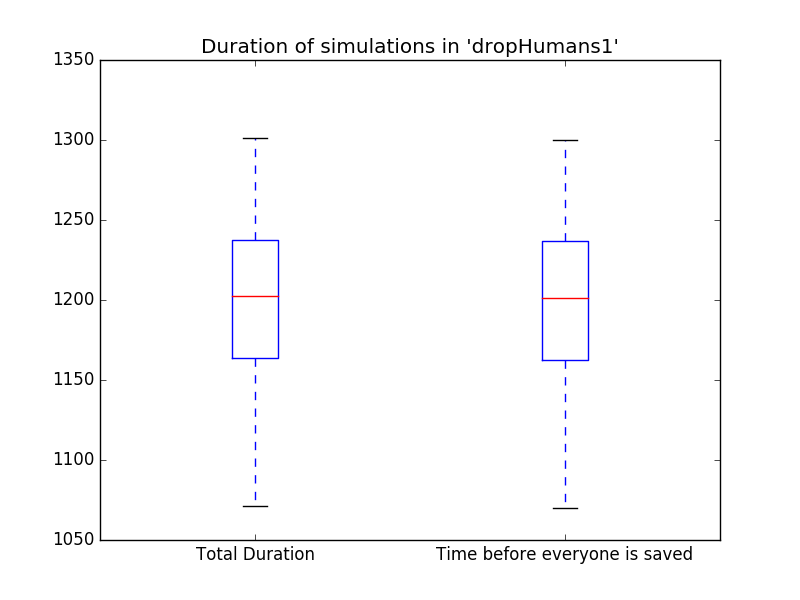 DropHumans1 - duration boxplot.png 800 × 600; 25 KB
DropHumans1 - duration boxplot.png 800 × 600; 25 KB
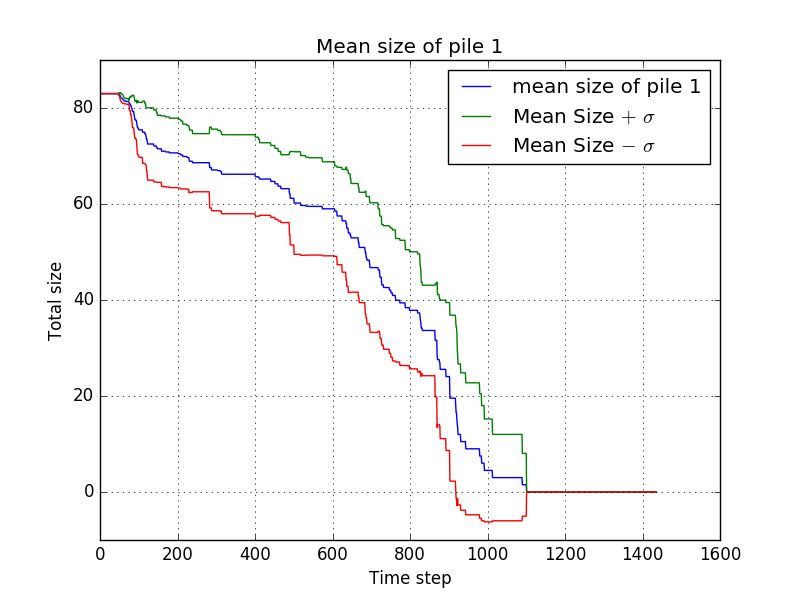
 DropHumans1 - mean size at pile 1.png 800 × 600; 48 KB
DropHumans1 - mean size at pile 1.png 800 × 600; 48 KB
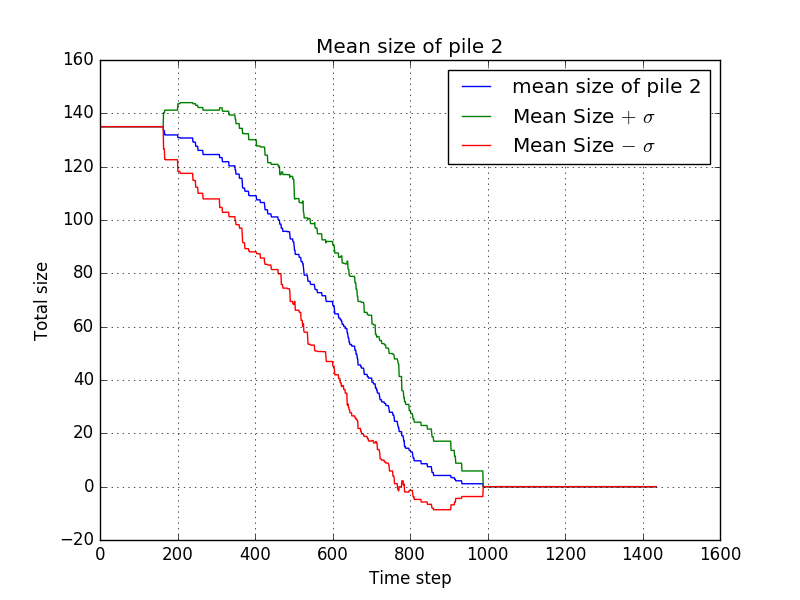
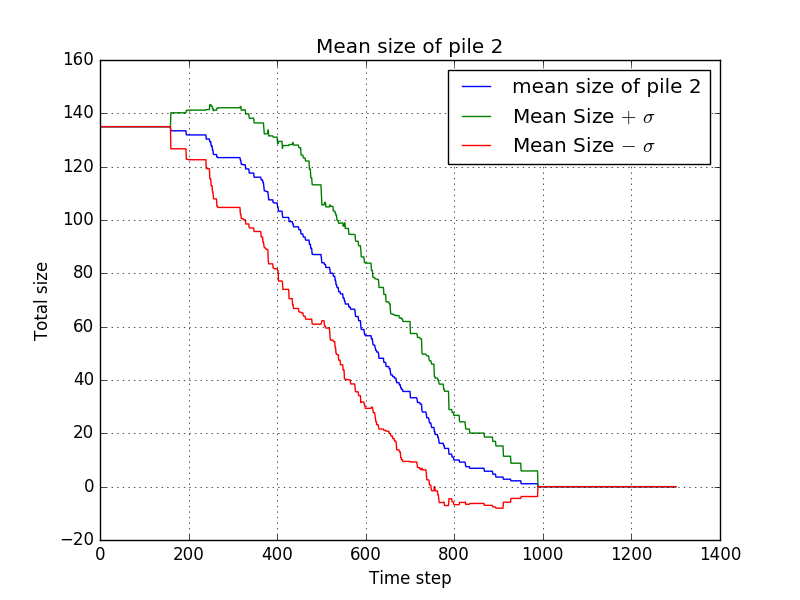 DropHumans1 - mean size at pile 2.png 800 × 600; 53 KB
DropHumans1 - mean size at pile 2.png 800 × 600; 53 KB
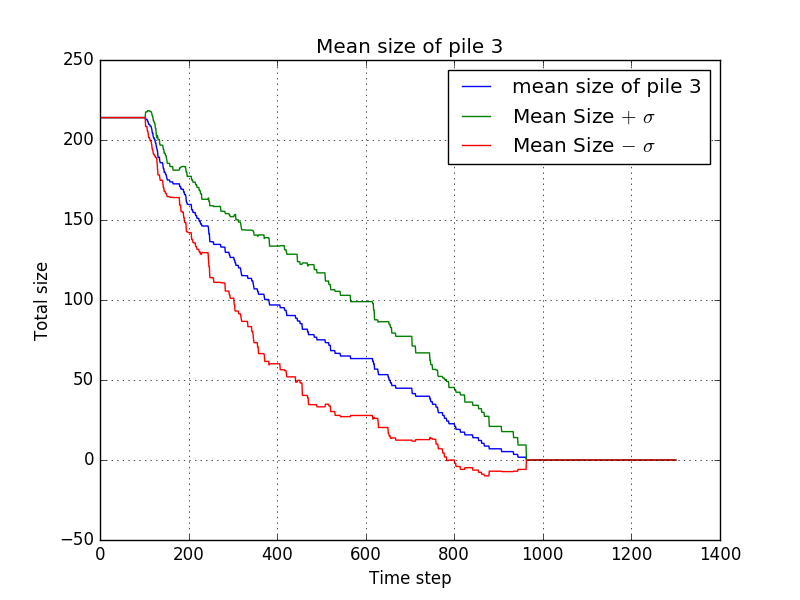 DropHumans1 - mean size at pile 3.png 800 × 600; 51 KB
DropHumans1 - mean size at pile 3.png 800 × 600; 51 KB
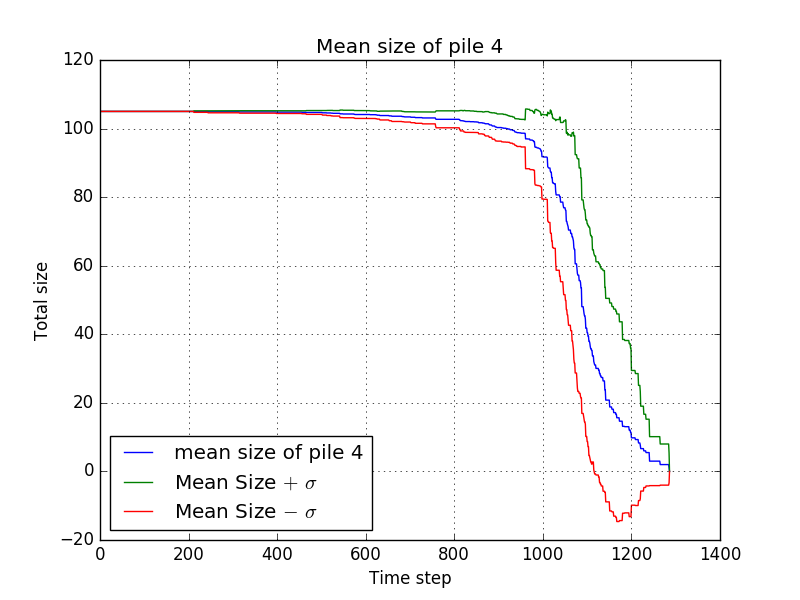
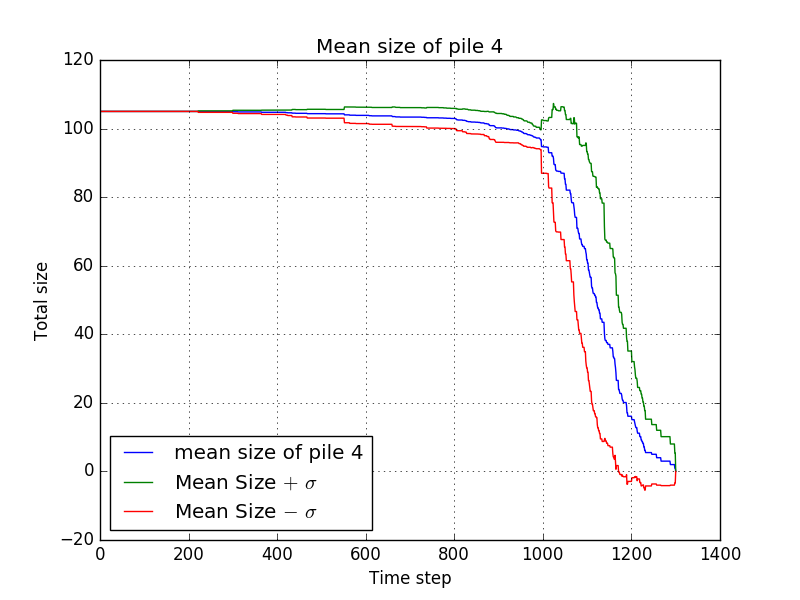 DropHumans1 - mean size at pile 4.png 800 × 600; 50 KB
DropHumans1 - mean size at pile 4.png 800 × 600; 50 KB
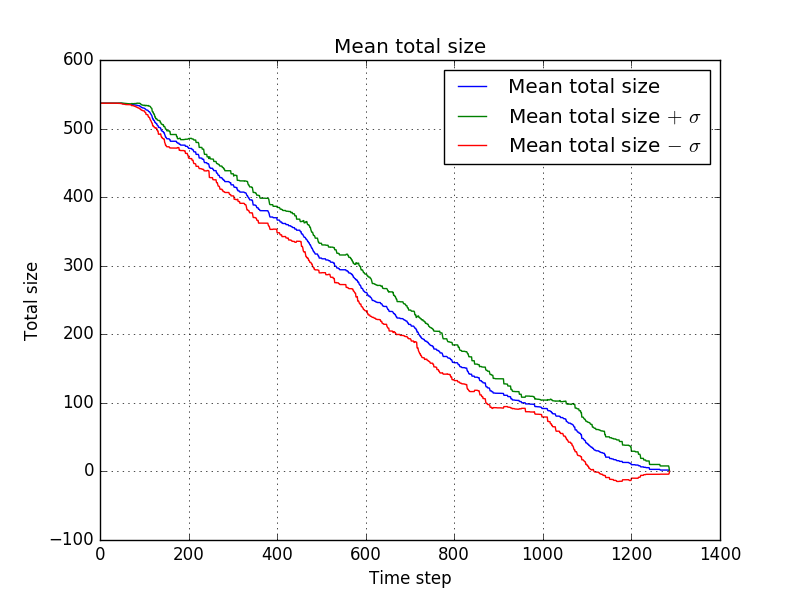
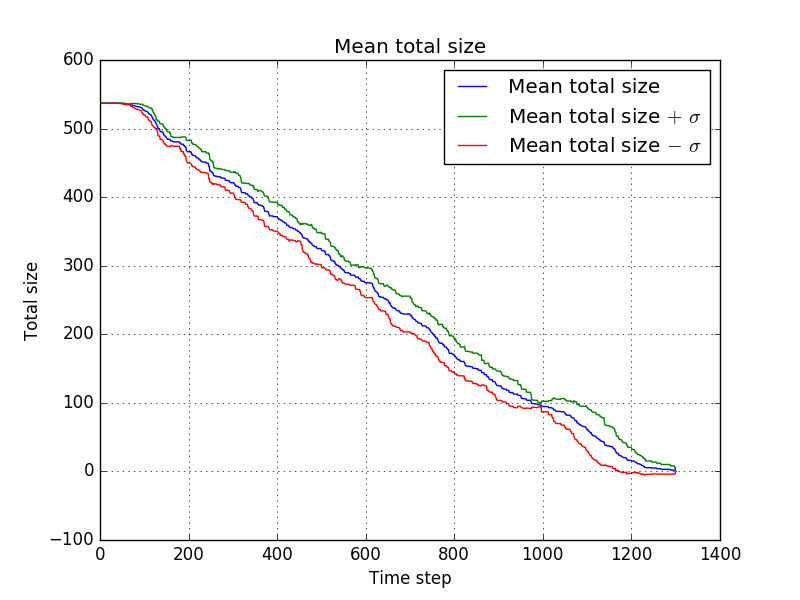 DropHumans1 - mean total size.png 800 × 600; 59 KB
DropHumans1 - mean total size.png 800 × 600; 59 KB
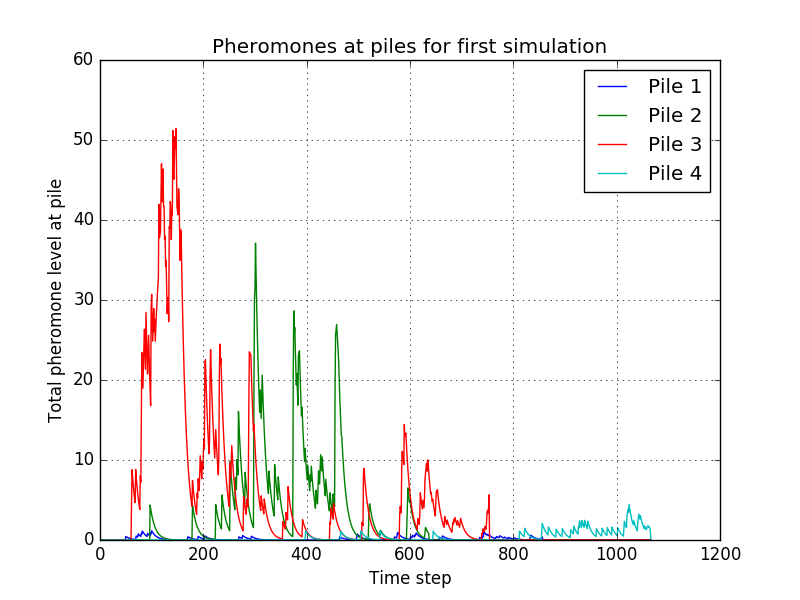
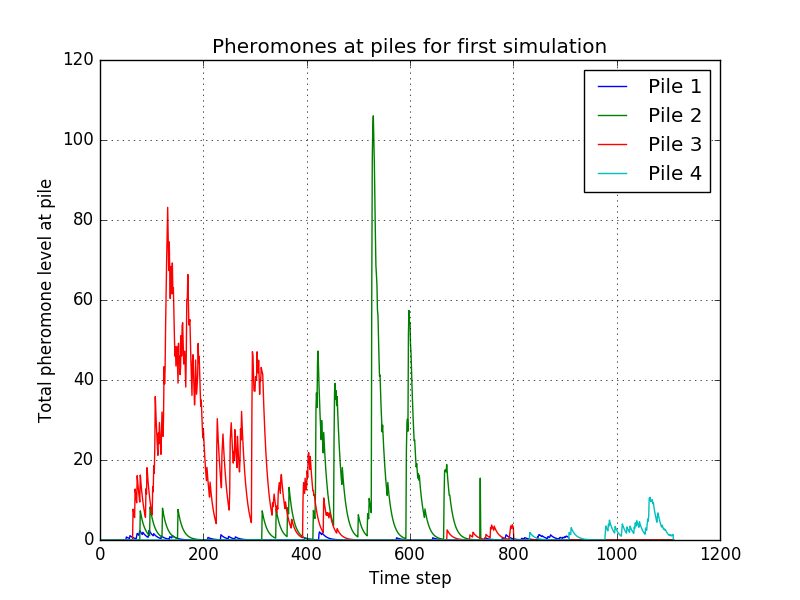 DropHumans1 - pheromones for first simulation.png 800 × 600; 65 KB
DropHumans1 - pheromones for first simulation.png 800 × 600; 65 KB
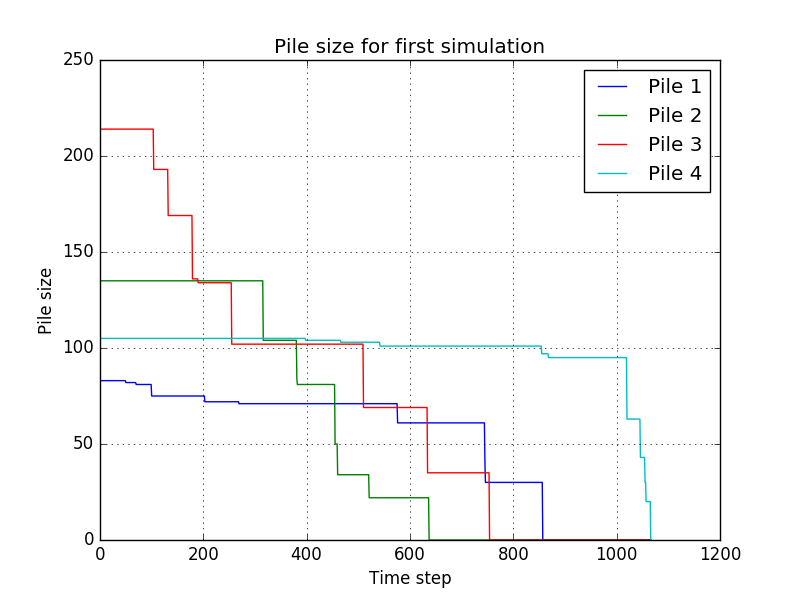
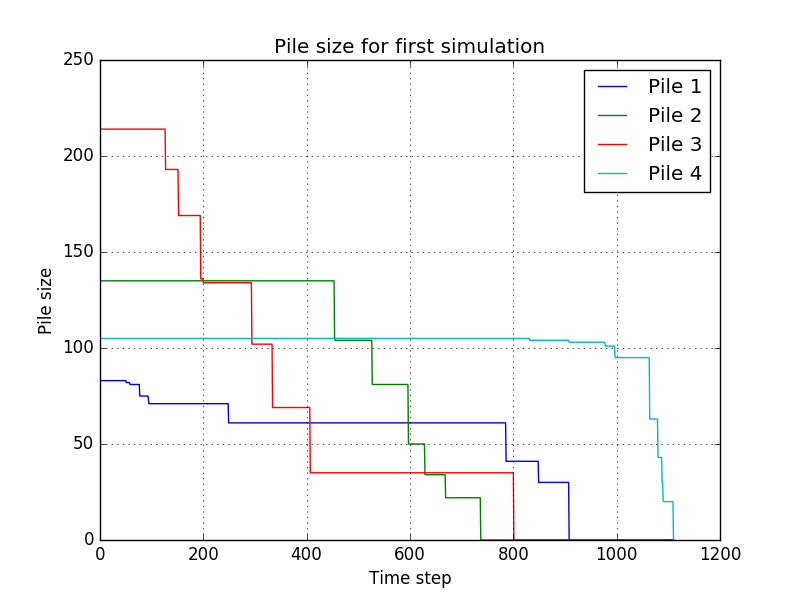 DropHumans1 - pile size for first simulation.png 800 × 600; 35 KB
DropHumans1 - pile size for first simulation.png 800 × 600; 35 KB
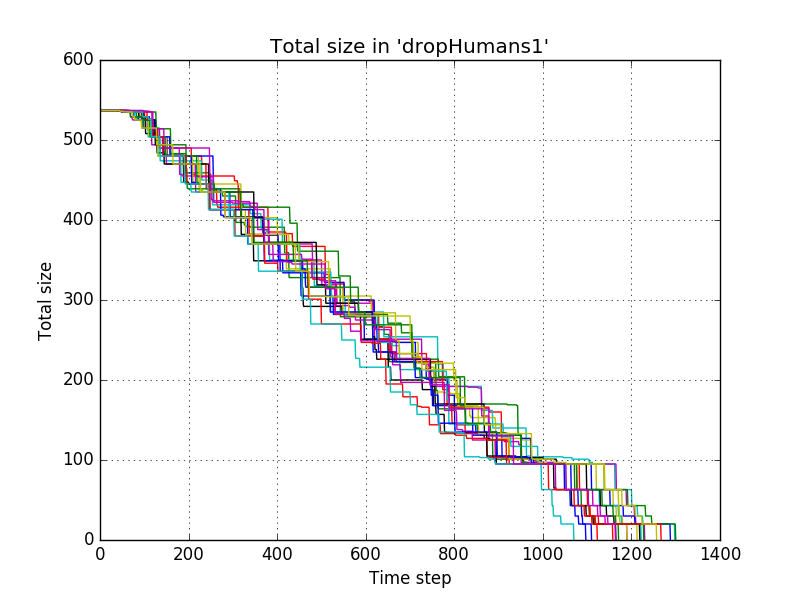 DropHumans1 - total size.png 800 × 600; 76 KB
DropHumans1 - total size.png 800 × 600; 76 KB
 DropHumans2 - duration boxplot.png 800 × 600; 27 KB
DropHumans2 - duration boxplot.png 800 × 600; 27 KB
 DropHumans2 - mean size at pile 1.png 800 × 600; 49 KB
DropHumans2 - mean size at pile 1.png 800 × 600; 49 KB
 DropHumans2 - mean size at pile 2.png 800 × 600; 53 KB
DropHumans2 - mean size at pile 2.png 800 × 600; 53 KB
 DropHumans2 - mean size at pile 3.png 800 × 600; 50 KB
DropHumans2 - mean size at pile 3.png 800 × 600; 50 KB
 DropHumans2 - mean size at pile 4.png 800 × 600; 51 KB
DropHumans2 - mean size at pile 4.png 800 × 600; 51 KB
 DropHumans2 - mean total size.png 800 × 600; 58 KB
DropHumans2 - mean total size.png 800 × 600; 58 KB
 DropHumans2 - pheromones for first simulation.png 800 × 600; 75 KB
DropHumans2 - pheromones for first simulation.png 800 × 600; 75 KB
 DropHumans2 - pile size for first simulation.png 800 × 600; 36 KB
DropHumans2 - pile size for first simulation.png 800 × 600; 36 KB
 DropHumans2 - total size.png 800 × 600; 73 KB
DropHumans2 - total size.png 800 × 600; 73 KB
 DropHumans3 - duration boxplot.png 800 × 600; 24 KB
DropHumans3 - duration boxplot.png 800 × 600; 24 KB
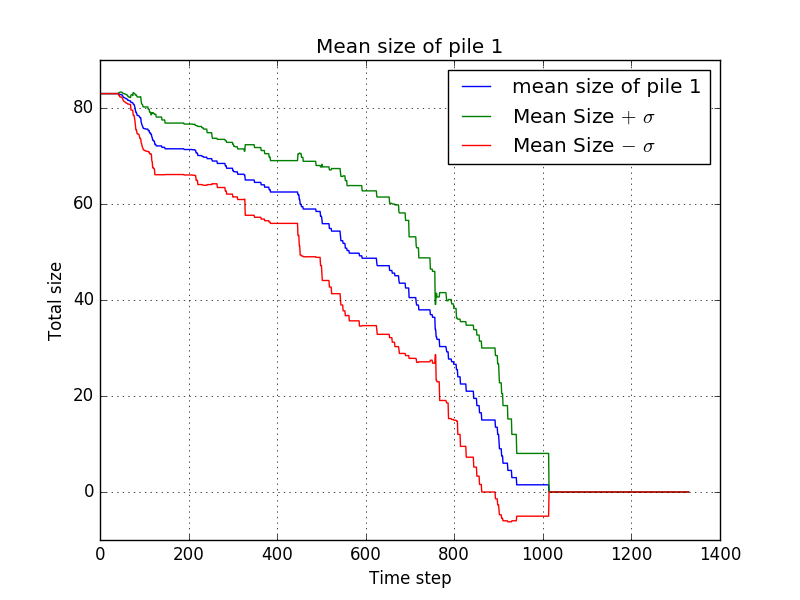
 DropHumans3 - mean size at pile 1.png 800 × 600; 48 KB
DropHumans3 - mean size at pile 1.png 800 × 600; 48 KB
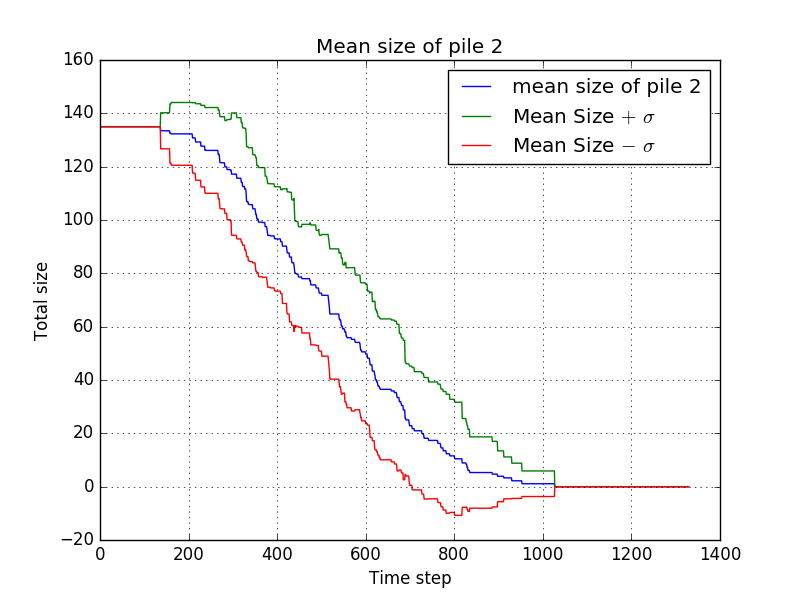
 DropHumans3 - mean size at pile 2.png 800 × 600; 52 KB
DropHumans3 - mean size at pile 2.png 800 × 600; 52 KB
 DropHumans3 - mean size at pile 3.png 800 × 600; 50 KB
DropHumans3 - mean size at pile 3.png 800 × 600; 50 KB
 DropHumans3 - mean size at pile 4.png 800 × 600; 50 KB
DropHumans3 - mean size at pile 4.png 800 × 600; 50 KB
 DropHumans3 - mean total size.png 800 × 600; 58 KB
DropHumans3 - mean total size.png 800 × 600; 58 KB
 DropHumans3 - pheromones for first simulation.png 800 × 600; 68 KB
DropHumans3 - pheromones for first simulation.png 800 × 600; 68 KB
 DropHumans3 - pile size for first simulation.png 800 × 600; 35 KB
DropHumans3 - pile size for first simulation.png 800 × 600; 35 KB
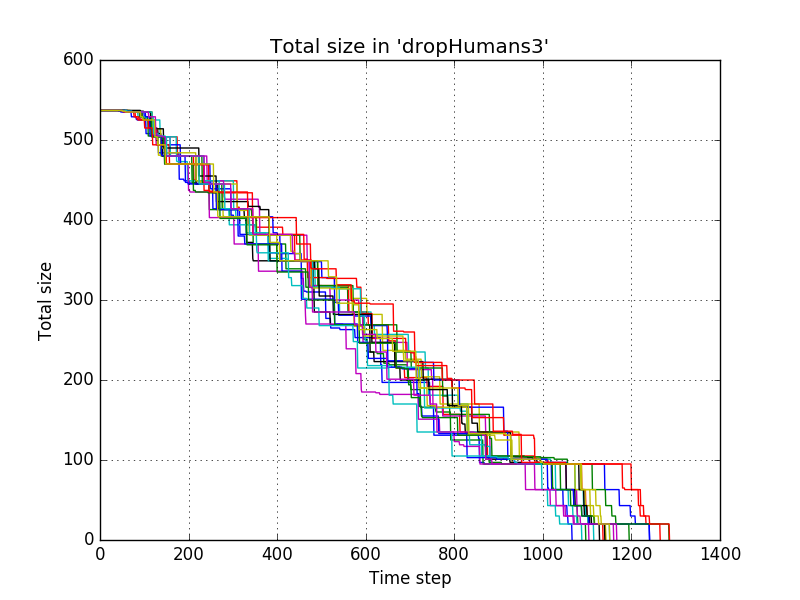 DropHumans3 - total size.png 800 × 600; 74 KB
DropHumans3 - total size.png 800 × 600; 74 KB
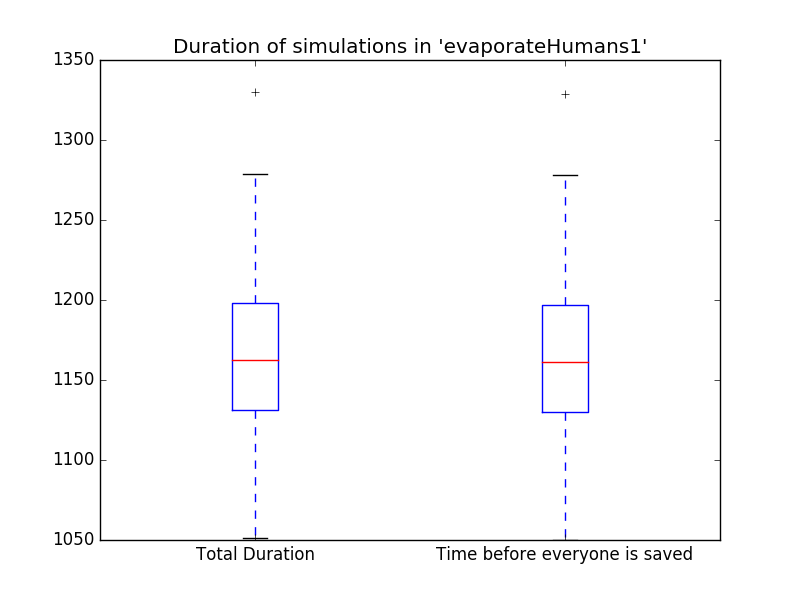 EvaporateHumans1 - duration boxplot.png 800 × 600; 26 KB
EvaporateHumans1 - duration boxplot.png 800 × 600; 26 KB
 EvaporateHumans1 - mean size at pile 1.png 800 × 600; 49 KB
EvaporateHumans1 - mean size at pile 1.png 800 × 600; 49 KB
 EvaporateHumans1 - mean size at pile 2.png 800 × 600; 53 KB
EvaporateHumans1 - mean size at pile 2.png 800 × 600; 53 KB
 EvaporateHumans1 - mean size at pile 3.png 800 × 600; 50 KB
EvaporateHumans1 - mean size at pile 3.png 800 × 600; 50 KB
 EvaporateHumans1 - mean size at pile 4.png 800 × 600; 50 KB
EvaporateHumans1 - mean size at pile 4.png 800 × 600; 50 KB
 EvaporateHumans1 - mean total size.png 800 × 600; 58 KB
EvaporateHumans1 - mean total size.png 800 × 600; 58 KB
 EvaporateHumans1 - pheromones for first simulation.png 800 × 600; 69 KB
EvaporateHumans1 - pheromones for first simulation.png 800 × 600; 69 KB
 EvaporateHumans1 - pile size for first simulation.png 800 × 600; 35 KB
EvaporateHumans1 - pile size for first simulation.png 800 × 600; 35 KB
 EvaporateHumans1 - total size.png 800 × 600; 75 KB
EvaporateHumans1 - total size.png 800 × 600; 75 KB
 EvaporateHumans2 - duration boxplot.png 800 × 600; 27 KB
EvaporateHumans2 - duration boxplot.png 800 × 600; 27 KB
 EvaporateHumans2 - mean size at pile 1.png 800 × 600; 49 KB
EvaporateHumans2 - mean size at pile 1.png 800 × 600; 49 KB
 EvaporateHumans2 - mean size at pile 2.png 800 × 600; 52 KB
EvaporateHumans2 - mean size at pile 2.png 800 × 600; 52 KB
 EvaporateHumans2 - mean size at pile 3.png 800 × 600; 49 KB
EvaporateHumans2 - mean size at pile 3.png 800 × 600; 49 KB
 EvaporateHumans2 - mean size at pile 4.png 800 × 600; 52 KB
EvaporateHumans2 - mean size at pile 4.png 800 × 600; 52 KB
 EvaporateHumans2 - mean total size.png 800 × 600; 58 KB
EvaporateHumans2 - mean total size.png 800 × 600; 58 KB
 EvaporateHumans2 - pheromones for first simulation.png 800 × 600; 70 KB
EvaporateHumans2 - pheromones for first simulation.png 800 × 600; 70 KB
 EvaporateHumans2 - pile size for first simulation.png 800 × 600; 35 KB
EvaporateHumans2 - pile size for first simulation.png 800 × 600; 35 KB
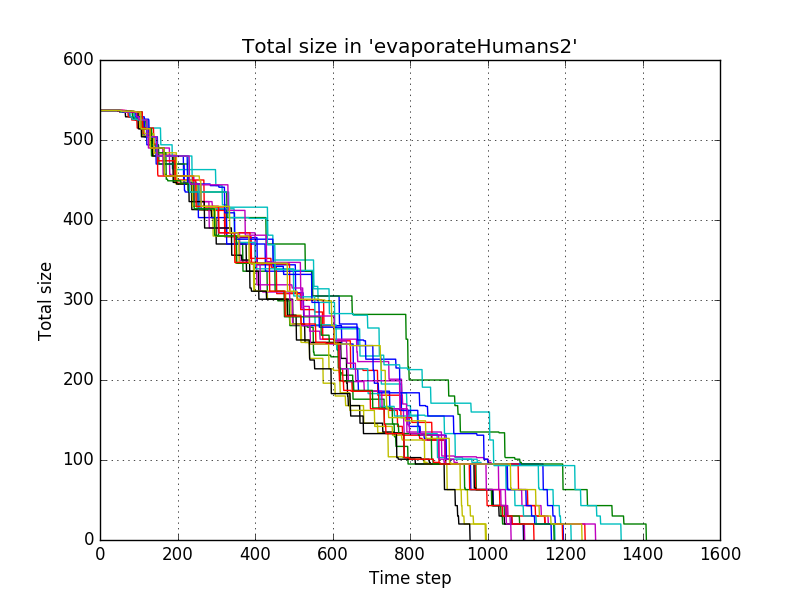 EvaporateHumans2 - total size.png 800 × 600; 76 KB
EvaporateHumans2 - total size.png 800 × 600; 76 KB
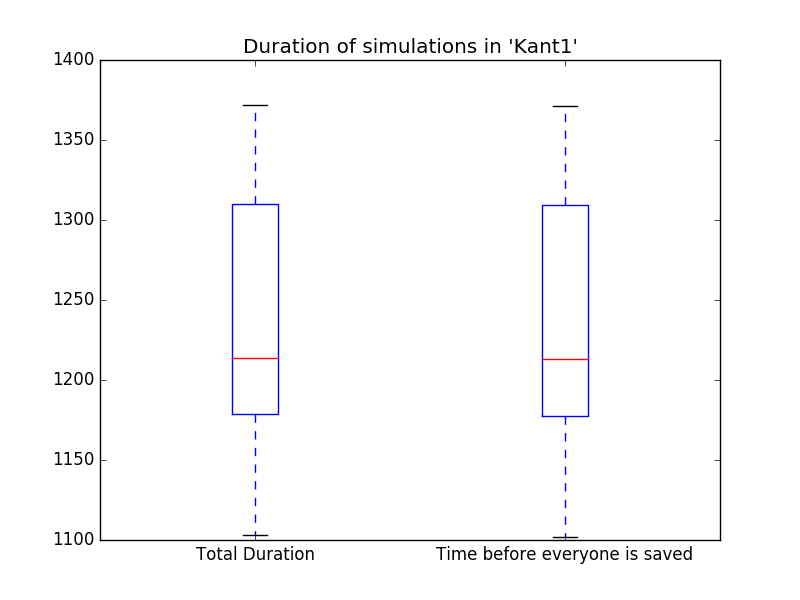 Kant1 - duration boxplot.png 800 × 600; 24 KB
Kant1 - duration boxplot.png 800 × 600; 24 KB
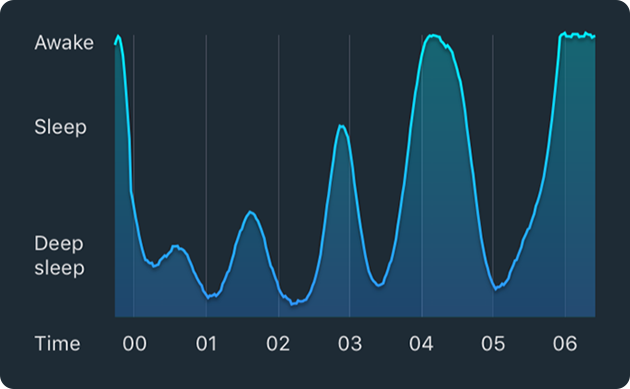 Sleepcycle irregular sleep.png 630 × 389; 67 KB
Sleepcycle irregular sleep.png 630 × 389; 67 KB
 Type A.jpg 600 × 450; 24 KB
Type A.jpg 600 × 450; 24 KB
 Type B.jpg 1,112 × 1,300; 46 KB
Type B.jpg 1,112 × 1,300; 46 KB
 SlaapGrafieken.png 204 × 311; 8 KB
SlaapGrafieken.png 204 × 311; 8 KB
 PlanningGroup4.jpg 707 × 343; 25 KB
PlanningGroup4.jpg 707 × 343; 25 KB
 FlightPathCombained.png 781 × 671; 26 KB
FlightPathCombained.png 781 × 671; 26 KB
 Questionnaire Q2.png 765 × 318; 24 KB
Questionnaire Q2.png 765 × 318; 24 KB
 SketchConstructionSite.png 3,500 × 4,092; 3.3 MB
SketchConstructionSite.png 3,500 × 4,092; 3.3 MB
 FSR 406 specs.PNG 533 × 516; 40 KB
FSR 406 specs.PNG 533 × 516; 40 KB
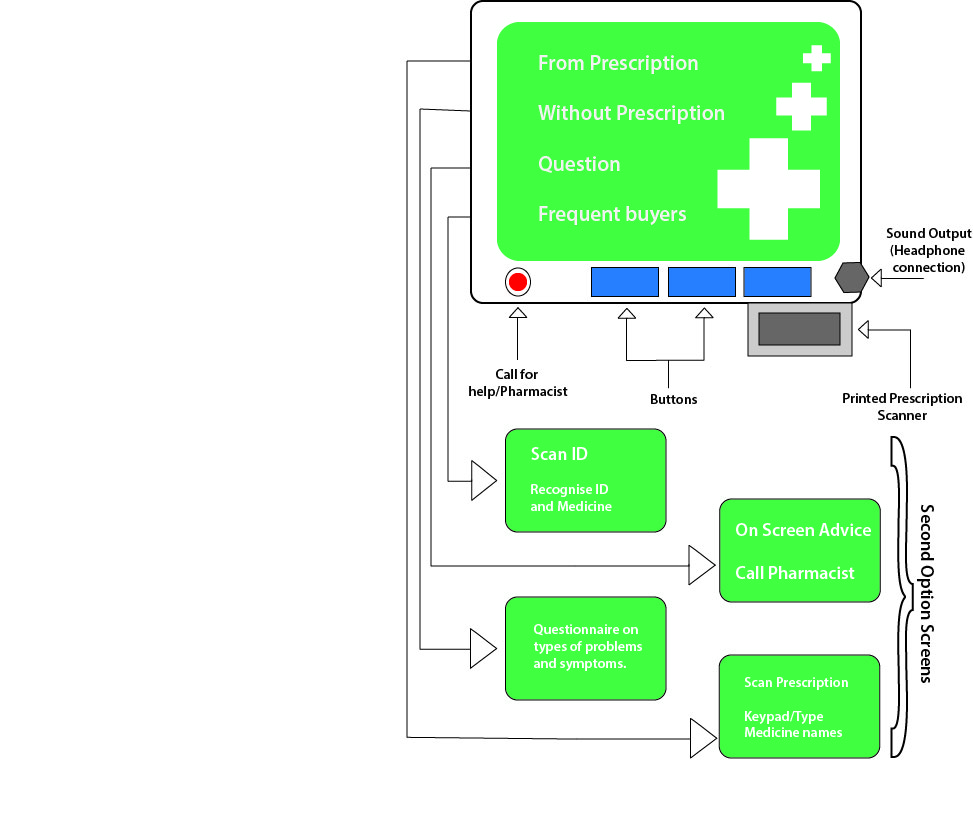 User Interface (Pharmacy Robot).jpg 973 × 814; 784 KB
User Interface (Pharmacy Robot).jpg 973 × 814; 784 KB
 PossibleInterface.png 652 × 650; 28 KB
PossibleInterface.png 652 × 650; 28 KB
- Minutes 4th March.pdf ; 417 KB
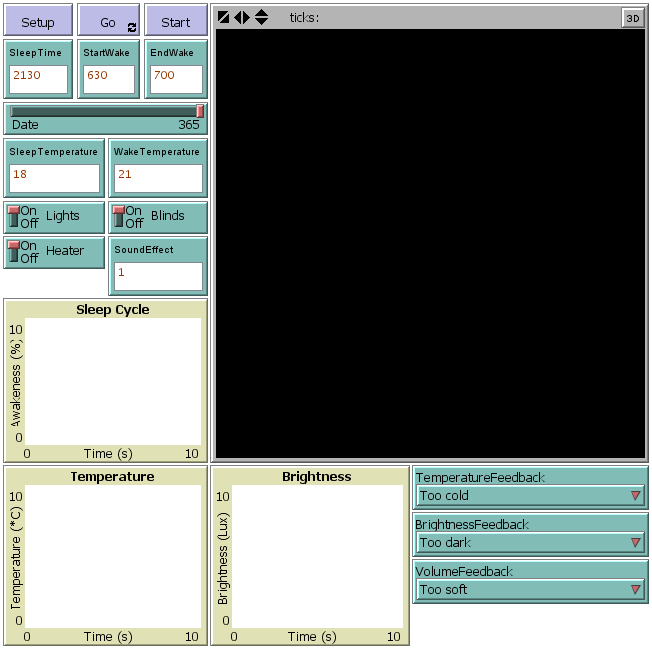
 MeasureSleep.jpg 899 × 651; 54 KB
MeasureSleep.jpg 899 × 651; 54 KB
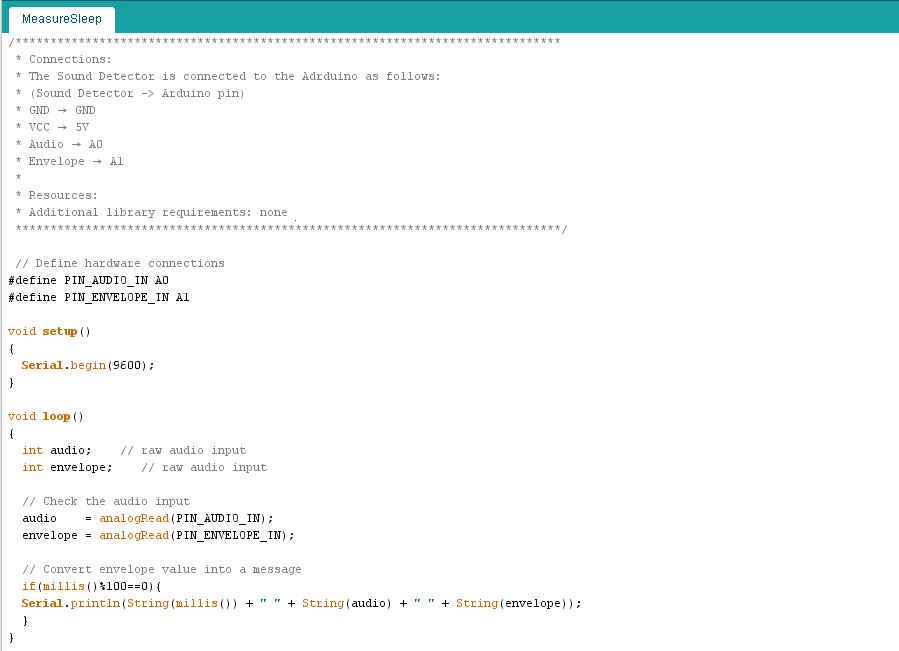
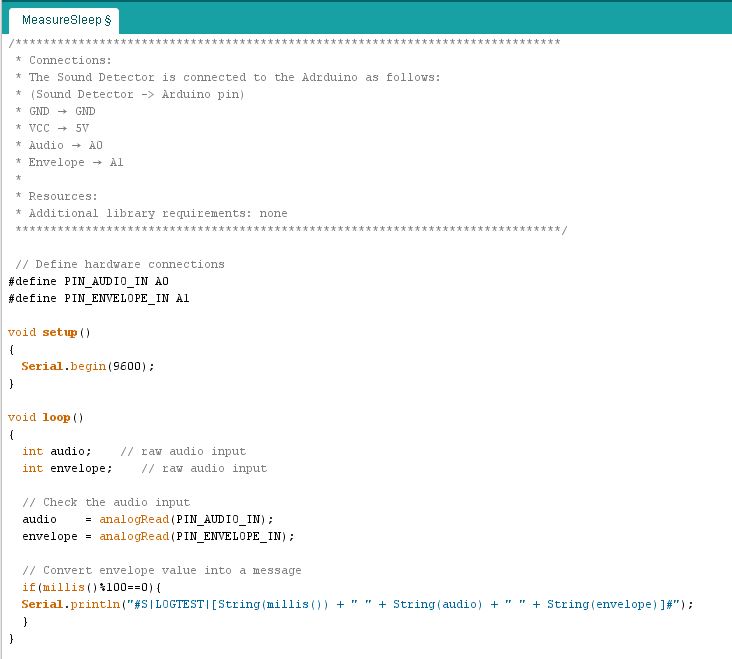 MeasureSleep.JPG 732 × 659; 53 KB
MeasureSleep.JPG 732 × 659; 53 KB
 Layout inventory foodfetcher.PNG 490 × 867; 180 KB
Layout inventory foodfetcher.PNG 490 × 867; 180 KB
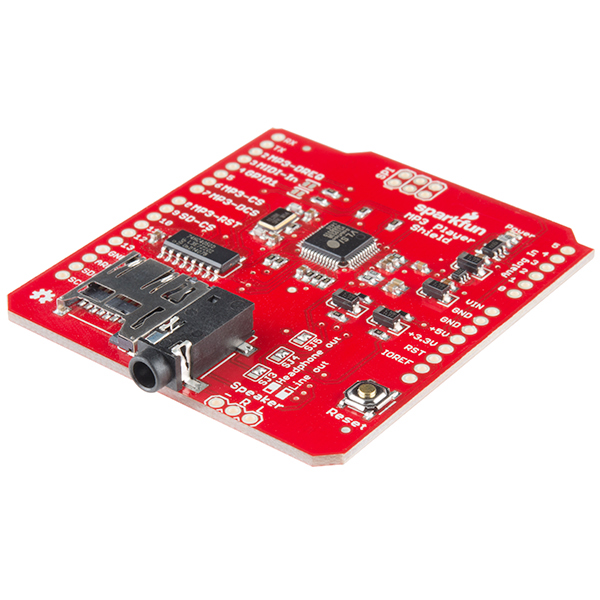 MP3PlayerShield.jpg 600 × 600; 230 KB
MP3PlayerShield.jpg 600 × 600; 230 KB
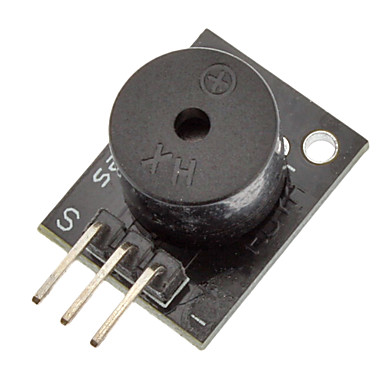 Buzzer.jpg 384 × 384; 28 KB
Buzzer.jpg 384 × 384; 28 KB
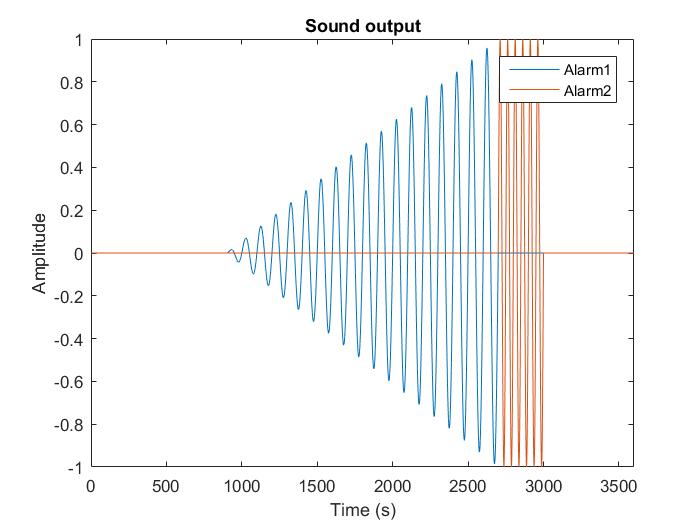 SoundOutput-1-.jpg 700 × 525; 39 KB
SoundOutput-1-.jpg 700 × 525; 39 KB
 SoundOutput-2-.jpg 700 × 525; 27 KB
SoundOutput-2-.jpg 700 × 525; 27 KB
 Capture3.png 1,033 × 826; 30 KB
Capture3.png 1,033 × 826; 30 KB
- Fourier.m ; 2 KB
- Ademhaling.m ; 3 KB
 Wesley16-3-2016.png 610 × 820; 72 KB
Wesley16-3-2016.png 610 × 820; 72 KB
 Jeroen17-3-2016.png 702 × 1,010; 98 KB
Jeroen17-3-2016.png 702 × 1,010; 98 KB
 Jeroen 18-3-2016.png 708 × 1,070; 99 KB
Jeroen 18-3-2016.png 708 × 1,070; 99 KB
- Wake up.m ; 3 KB
 Layout shoppinglist.PNG 355 × 625; 17 KB
Layout shoppinglist.PNG 355 × 625; 17 KB
 Data capture5.png 830 × 701; 22 KB
Data capture5.png 830 × 701; 22 KB
 Data capture6.png 849 × 687; 21 KB
Data capture6.png 849 × 687; 21 KB
- Decision making flowchart3.pdf ; 154 KB
 Bestandsnaam.jpg 460 × 817; 58 KB
Bestandsnaam.jpg 460 × 817; 58 KB
 File-page3.jpg 4,813 × 3,513; 612 KB
File-page3.jpg 4,813 × 3,513; 612 KB








































.jpg)





















































































































.jpg)
.jpg)
.jpg)
.jpg)
.jpg)




































































































.png)




















































































.jpg)

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}