Currents
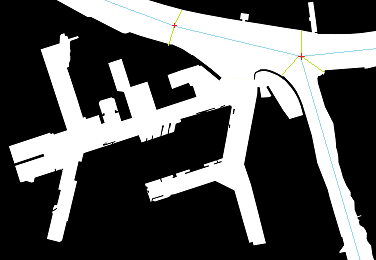
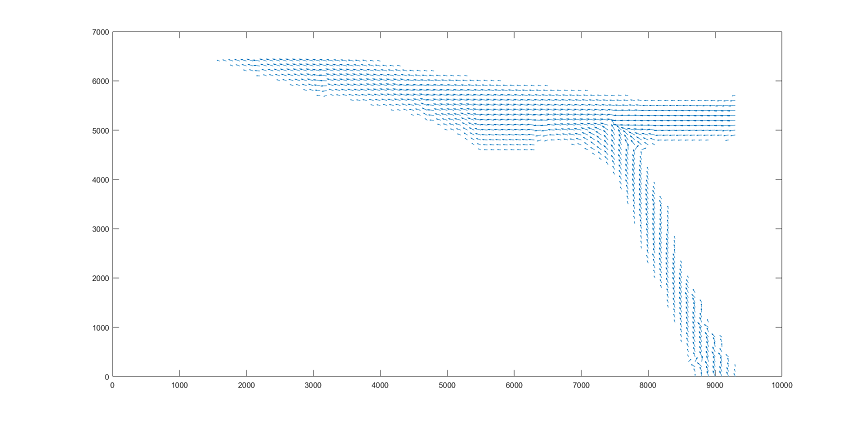
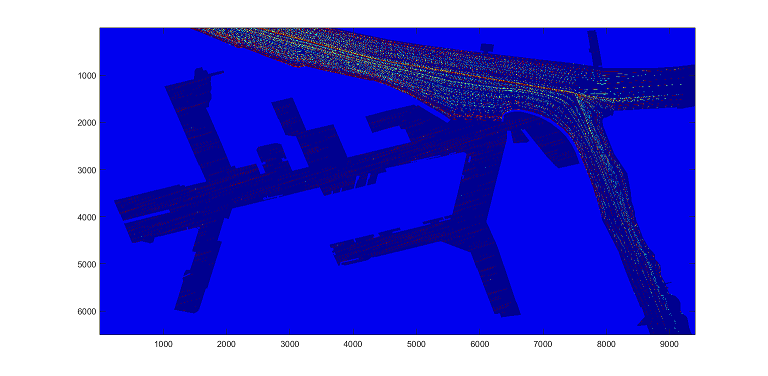
Another part of the script calculates the current in the Botlek area resulting from currents in the Oude Maas (Vertical river) & Nieuwe Maas (Horizontal river). The current is a very rough approximation for speed. It is based on a combination of laminar flow and self determined straight major flow lines which determine the angles. The angles are 'smoothed' to give a more realistic general flow pattern. This is done by taking into account the coordinates of calculation and its relative placement in relation to:
- The major straight flow lines
- The shore and its angle
- Smooth lines ( in Map_calculation_lines.png: Blue lines / shore (and its angle) / Green lines )
The closer to the major flow-lines the more the speed equals 1m/s and the closer towards the shore the more the speed equals 0.36m/s. For the angles the overall angle of a coordinate is determined by how close the major flow-lines, smoothlines or shore is in relation to the coordinate. Where the closer it gets towards one of these the more its angle determines the overall angle of the coordinate.
Each data point with water contains a current velocity value [m/s] and an angle value [Radial].
With angles being relative to unite circle orientation and the velocity being positive in the angle direction. The image on the right shows these currents in the river with the overall map on the left for comparison.
pH
The pH-values are also predefined, since the values differ per pixel. If those values would have to be calculated in the simulation, a lot of the total computation time would be used on this operation. To add some sort of randomness, three separate pH matrices are made, and for every time step one of these three matrices are chosen to be the pH present on the map. The values given to all the pixels are chosen by picking a value from a normal distribution, with a mean of 8.388 and a standard deviation of 0.004 [1]. The script to make those matrices could also be used for other pollution related that have to be measured in order to find a conclusion whether there's pollution or not.
Source: [1] Gast, J.A.. REPRODUCIBILITY OF PH MEASUREMENTS IN SEAWATER. Department of Oceanography, Humboldt State College, Arcata, California. Retrieved from http://www.aslo.org/lo/toc/vol_11/issue_3/0417.pdf
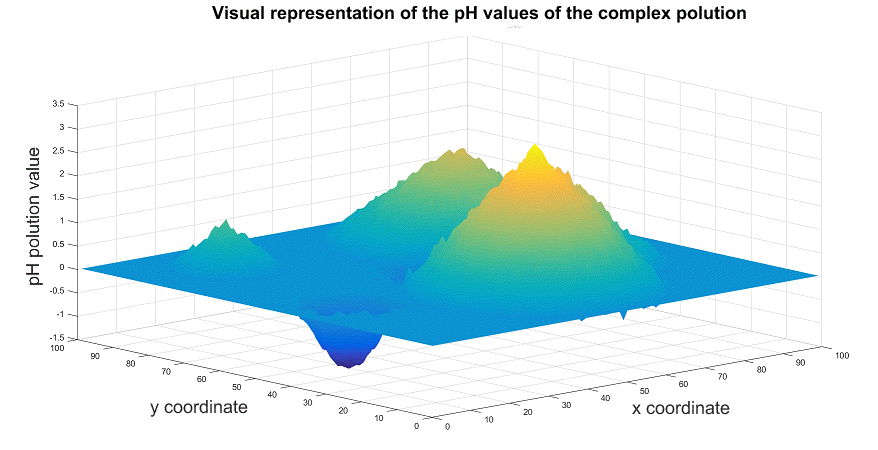
pH-contaminations
Creates an initial pollution and then creates a matrix containing this data which will then change over time depending on current and wind speed. This creates a pollution that has to increase or decrease the value of the overall pH-matrix. Swarm observation threshold for the final simulation should be 8.388 +/- 0.5. So values below 8.388-0.5 or above 8.388+0.5 are considered to be a pollution.
Here a pollution is visualized. On the left there is an image of how a pH pollution is defined in the simulation. On the right a video is placed where a contamination enters the system on the bottom right corner of the system and then moves through the river.
Day/Night cycle
The length of a day/night cycle differs per day of the year. Considering when this part of the script was made, 22 December[2], the shortest day of the year was chosen to model the cycle. Realistically, the curve which gives the light level varies per day. Since in the simulation one time step equals one second of simulation time, a day consists of 24*60*60 time steps, which is 86400 time steps. From 16:30 till 7:30, no light is present, and from 7:30 till 16:30, the function of the light follows half of a sine period, with a peak at 12:00 with an amplitude of 200Wm-2.
Source: [2] Burgess, P. (2009, 29 september). VARIATION IN LIGHT INTENSITY AT DIFFERENT LATITUDES AND SEASONS, EFFECTS OF CLOUD COVER, AND THE AMOUNTS OF DIRECT AND DIFFUSED LIGHT. Retrieved from http://www.ccfg.org.uk/conferences/downloads/P_Burgess.pdf
Wind
Wind direction is based on the probability of a certain wind direction on a given day, based on real life data[3]. A random value is generated every 10800 time steps (this value can be changed in the simulation), which when generated will determine the wind direction. A normal value with a mean of 10 and a standard deviation of 0.5 is chosen for the wind strength.
Source: [3] https://www.windfinder.com/weatherforecast/rotterdam_airport
Boats
Boats are implemented in the simulation in order to see the swarm's behaviour when encountering other traffic. There's only one size boat in the simulation, namely a container ship which has a length of 367m (734pixels) and a width of 50m (100pixels). This ship has two routes, in one route the boat will start in the port, in the southwest part of the map, and will go towards sea, which is at the northwest part of the map. In the other route, this route is reversed. The boats and its routes can be clearly seen in the simulation video. The swarm will have to avoid the boat, and not the other way around. Also, the swarm should be careful when the boat turns, since the boat is fairly long, the ends of the boat rotate fast.
Driftwood
The driftwood part of the script is quite important for the simulation, considering the goal of the simulation is to remove those pieces of wood. There are 4 different sizes of driftwood in the simulation, namely (in pixels) 1x1, 2x1, 2x2 and 3x2. Every t, a random value gets generated, which decides whether one of those pieces will spawn if one were to spawn at all. The spawn rates of the driftwood can be changed easily, and do not have to be taken uniformly for the different sizes of driftwood. All of the pieces spawn in a random location where there is water, and when they do they receive an ID number. The ID numbers are separated for the different sizes of wood. The pieces get assigned an integer value, based on the size of the piece. This value is 4, 6, 8 and 10 for the sizes respectively. By subtracting these values from the map matrix, the swarm can read driftwood and also its size from the map. The movement of the driftwood per time step t is dependent on the current vector of the position of the piece, and also on the wind vector. In the figure, the traces of different pieces that spawned can be observed.
|
|
|
Swarm
The swarm system implemented in our simulation is very useful for the fast exploration of different types of water surfaces, such as lakes and rivers in all sort of shapes and sizes. Depending on the size of the surface you wish to explore, you might want to increase the size of the swarm. It could also be desired to use multiple swarms, to explore the area in less time. For our simulation usually two swarms, consisting of 30 drones each, were used in different position of the Botlek part in the Rotterdam harbour. The purpose of our swarm, however, is not only to explore the area, but then to check if any pollution, in and on the water, is present. When the pollution is placed on top of the water, our drones will cooperate to remove these obstacles.
Each swarm consists of 30 robots which all have one of three different types, the amount of each can be determined before running the simulation. Apart from different behaviour when near the shore, all robot types act the same. It is still very useful to have 3 different robot types, because it enables multiple forms of exploration and makes it easier for the swarm to adapt to different situations.
Type 1: This robot type will follow the shore upon contact. This means that it follows a certain path while staying close to the shore, either on the left or the right side of the drone. Even when a corner comes, it will still follow this. This robot type is especially useful to implement in areas with complex geometrical structures, because it enables the robot to always escape these areas. It is also great for places where it is dangerous if anything is in the middle of the water, such as boat routes.
Type 2: This robot type will act similar to type 1 at first and follow the shore, but whenever a turn appears, this type of robot will move straight ahead, this is really useful to have in your swarm when there are a lot of places where multiple rivers come together or there are a lot of small islands in the water, where type 1 would keep turning circles around. Similar to type 1 it is also great to implement in places where the middle is dangerous, however type 1 would stay safer.
Type 3: When in contact with the shore, this type of drone will ‘bounce’ of the shore, with an angle equal to the angle it arrived. This type of drone is most likely to be implemented in large areas of water or wide rivers.
Although each robot type has different qualities, it is advised to at least have a couple of each type in your swarm.
|
There are two major ways the swarm communicates. The first communication happens during the exploration mode, where each robot makes sure it stays close enough to at least one other robot and at the same time keeps close enough to the center point of the swarm. Whenever it moves too far away, the robot will turn around to the center point of the swarm.
The second form of communication happens whenever a drone finds an obstacle, the drone will then communicate to the other robots, whether it is able to move the object by itself or not. If it is not able too move the object by itself it will call the nearest available drone for help, this will continue until there are enough drones present to move the object. Then they will move the object to a hub, where the object will be removed from the water.
In the video on the right a closeup is made of the swarm, here it can be seen how a drone calls for help if needed to remove a piece of driftwood from the system. This can also be found on youtube using the following link: https://www.youtube.com/watch?v=rq5HH48gL3Y
|
|
|
Results
The generated data of 4 different simulations are analysed. These simulations are all done for the same amount of robots and the same ratio's in robot type.
The simulations can be found in the zip file under 'results'. The most important result is when we compare the amount of wood that is in the maximum range of the swarm and how much of that wood is actually found by the robots. This percentage is dependent on where the robots are situated. When the robots are all situated in the Botlek, where only wind influences the wood, this percentage can be quite high. In the best case 60-80 percent is collected. The result is completely different when the robots are all situated in the main river where the water stream plays a large role. In this case we only got a percentage of 17-25 percent.
Another important factor is the response time of the robots. This tells how fast the robots find the wood after it has spawned. We see the tendency that the robots in the Botlek initially have a higher response time than the robots in the main river. This can be explained by the fact that the wood flows towards the robots in the river. However there are some very high peaks in the double river position of the swarm. The robots are so busy with the salvaging with the huge amount of wood that it over reaches the swarm capacities. This could also explain the fact that much less wood in the river area is found that is in range of the robots. The robots are overworked in the main river. They get more wood to process than they can handle.
The last value we have looked at is the waitingresponse time, which tells how much time is needed for the second or even third robot to arrive at the woodlocation.
The waitingresponse time values for the 2x2 blocks are much lower then those for the 3x2 blocks. This can be explained by the fact that 2 robots are always close together but the third one doesn't have to be that close. Making the waitingresponse time for the 3x2 blocks much larger. The waitingresponse time in the river is generally larger than in the Botlek. This can be explained by the fact of the large amount of wood, when robots go out of the hub in the river they encounter wood much faster, this also results in more woodblocks where more robots are needed. This location is generally much closer to the hub than with the situation in the Botlek. The nearest robots are thus much faster at the required location. But this also means that less robots are available for searching again explaining the higher responsetimevalues and the lower percentage of the wood found that is in range. Because the most important task is helping other robots.
In future research this could be changed by playing with parameters like the amount of robots and how they distribute tasks. Our simulation provides this basis and could be worked on in the future for more complex and multitask situations.
Week 1
The goal of the first week was to decide on a subject for our project and what we were planning to do with this. This started on Monday with the first lecture, where we got more information about the course itself. After this we started brainstorming about different possible ideas to look into. A few examples of the things we looked at were space-exploration, robotic prosthetic and automating hazardous professions like firefighting. In the end we decided on swarm technology. We did still have to specify this so after the meeting we individually looked into some different applications of swarm technology. In the second meeting (17-11) we decided on a final subject: using swarm technology to observe the environment, focused on water like harbors and rivers. Here we want to test the quality of the water by looking at Chemicals, temperature, pH and metals. We decided on making a simulation of the system which can eventually be expanded. The next step was to figure out exactly what we need to make the simulation as realistic as possible, the USE-aspects and how we are going to approach the goal we set for ourselves. Our next meeting (19-11) was focused on combining the results we made throughout the week into a presentation that was to be given the following Monday.
File:Presentation week1.pdf
File:Notulen 17-11.pdf
File:Notulen 19-11.pdf
Week 2
|
In week 2 we were trying to do 2 major things.
First off, after receiving feedback on our presentation on Monday, we made contact with multiple organisations involved with the sanitation of water. We had contact with the sea harbor police, Greenpeace, Stichting-Noordzee and Rijkswaterstaat. A lot of these organisations could not give a specific answer to what problems our system should solve, since they always first encounter the problem which they then start solving. In the end the sea harbor police said they had a lot of trouble with drifting pieces of wood, since this can obstruct or even pierce their boats. Using this we changed the concept of our design to a point where the swarm should be able to find driftwood and push it to a place where it is not a problem (along with the previously defined tasks). This will give the system a specific user.
File:Notes 24-11.pdf
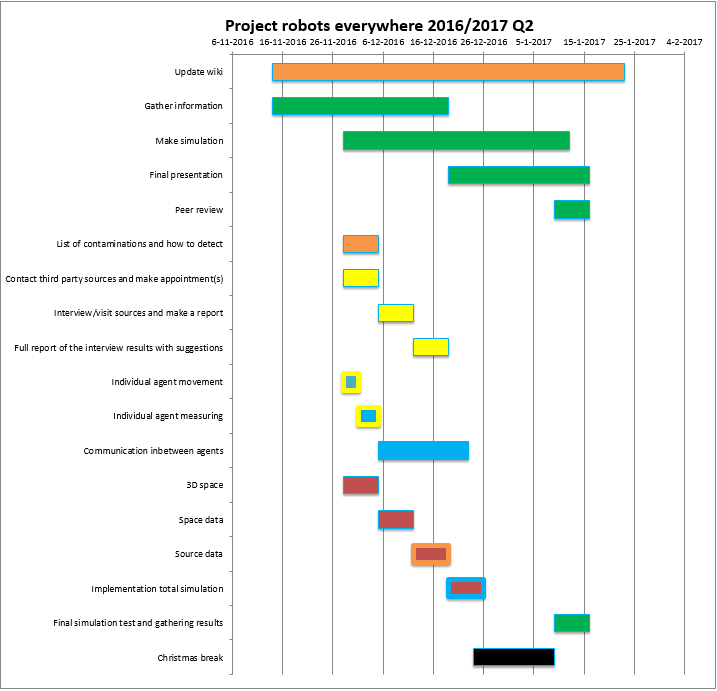
After this was done we started defining our tasks for the rest of the project. For this an initial Gantt-chart was already made in the first halve of the week. In the second meeting this week we distributed tasks which we then made individual gantt-charts for. In the third meeting we combined these to make one final charts which is to be presented in our second presentation. In this chart can be found who does what, when and with who they will be working together.
File:Notes 27-11.pdf
This same Gantt-chart is placed here on the right. In this chart every group/task has a different colour for clarity.
Green = everybody
Orange = Stijn
Yellow = Ralf
Blue = Stefan
Red = Koen & Zjeraar
|
|
|
Week 3
In week 3 every group started with their individual tasks (as described by the Gantt-chart in week 2). A complete list was made of the different contaminants we would like to investigate and how to do this using different sensors and how they could be applied. For the simulating of the swarm the Matlab application 'Multi-robot simulation' is investigated to check its functions and compatibility with our project. If these results are positive this program can be used to design our system. For the environment a map was made using a picture of the harbor of Rotterdam. A software was used to convert this into a black and white map we can use for our simulation.
Detection Methods
A list was made of all different contaminants we could look at for our system. After this methods were found to detect each of these. Following this list, combined with feedback of the users, a final choice can be made for which detection methods to incorporate in the final design.
Wood
This was explained by the sea-harbor police as a problem for them. The first option that was looked into was a Gelsight sensor, this sensor can determine what material it is pressed against by comparing its surface to a database. This would however need a drone to have already found the object in the first place. Because of this it would be better to combine cameras with recognition software to find floating objects, regardless of material.
Oxygen
For oxygen the most practical detection method for our system would be a dissolved oxygen sensor. For the amount of oxygen which can be dissolved in water is influenced by the factors of temperature, pressure and salinity. Because of this a dissolved oxygen sensor also has a thermometer and a barometer.
Salinity
The salinity is the amount of salts and similar materials in water. This is directly related to its conductivity. Because of this an electric conductivity meter can be used.
pH-value
The pH-value of water is a good indication of water pollution. Not only do some substances have a very low or high pH-value themselves, thus altering the value of the water when added. A low pH-value also allows (heavy) metals to dissolve more easily, making them mobile. For the pH-value a pH-sensor can be used, as the name implies.
Oil spills
Although a lot of pollutions can be seen visually by a person, for a drone this can be more difficult. A methods that could be applied to our system for the detection of oil can be using uv-fluorescence. This is based around oil reflecting uv-light, allowing it to be detected.
Metals and organic compounds
Especially heavy metals like mercury or lead or very poisonous. They are considered as some of the most dangerous pollutions possible. A method to detect them could a graphene based sensor, which is also based on electric conductivity. Another method for this could be spectrofoto-analysis. For this a light or laser is filtered and shone through a sample of water. Different materials absorb some wavelengths of the colour spectrum differently. By comparing these to a 'clean' sample the concentration of other substances can be determined. This works not only for metals but also for organic compounds like chlorine or sulfur. These machines can be quiet expansive though.
Simulting the Environment
Creation of 2D-space
In order to create a map for our simulation, we choose to render a map of the harbor into Matlab (we choose a piece of the harbor of Rotterdam called the Botlek). To do this a map of the harbor was taken and firstly edited a bit. The resolution was enhanced, smoothed out and colour-contrast was increased. Using a special script this was then translated into black-and-white picture of the map. This script gives all coordinates of water a value of 1 and the rest a value of 0. After this the resulting Matrix was doubled in size on both axis.
Space Data
For the basic conditions of the environment, parameters are given to the matrix created in the 2D-space.
pH/Temperature/Oxygen
For each of these parameters multiple matrices are made in advance. Then the simulation picks a random value of these matrices for the value of that parameter on a specific coordinate. This is done in order to create a normal distribution and deviation, which is more compliant with reality.
Current/Wind speed/Waves
These parameters are made in a similar fashion as previous parameters. Every coordinate is given an appropriate value (combining multiple coordinates to give a realistic image of these factors). Again each coordinate is given a slight deviation using a normal distribution and deviation value. These matrices are again saved.
Day/Night-cycle
To simulate this, the black content matrix (used in the creation of the 2D space) is multiplyied with an appropriate light intensity value, changing over time. This is saved as a new matrix.
Swarm system
Matlab was chosen to simulate the swarm. Firstly because we are familiar with the software and coding language, and we think it is capable of what we need. Secondly to ensure compatibility, since the virtual world is also made in Matlab. We found a program called MultiRobotSimulator (MRsim) which we studied to see how we could simulate a swarm.
In order to create a realistic simulation of a swarm of boatbots, it is important to understand which physical characteristics of these boatbots will influence their behavior. A list with educated guesses was made for this as part of the simulation-inventory, where these are described fully, including used sources. By choosing or comparing to off-the-shelf technology, this makes sure that our assumptions are realistic, and also makes the design-process more USE-based, specifically the entrepreneurial/market dimension.
As in previous weeks, the notes of our other meetings are linked to down below:
File:Notes 1-12.pdf
This following link is a link to our Dropbox files for this week. There all the files we worked on can be seen to clarify anything missing from the description above.
Week 3: [2]
Week 4
In week 4 we made our progress according to the Gantt-chart.
User-communication
We ran into a problem however when we tried to arrange meetings with the different institutes we contacted earlier. The company that designed the Wasteshark no longer works on this project, we did try to contact its original designer but he has not responded yet. The harbor of Rotterdam turned us down, saying they did not have time for us and HEBO Cat. BV can only see us starting January. We did have contact with the police of Rotterdam though and they have can meet us next week. What he could already tell us that the driftwood they have trouble with differ in seize from 20 cm to entire pallets.
Simulation
Drone movements
Meanwhile in the simulation, the general movements of 1 drone have been made. It can move around an environment without bumping into the sides, move in steps and make use of a hub. For the more complex algorithms, like communicating with his fellow drones, research was done to see if there is already a foundation for us to work with. For this we found an article describing multiple parameters we can use for our program.
Environment
For the environment multiple aspects were finalized. A day-and-night cycle was made using scalars based on the current time of year. This can be influenced by clouds and the time of year can also be changed.
Wind was added using the same principle as the pH-value from week 3. The difference here is that wind is not a scalar but a vector, adding a direction. The angle this vector can change will be in a fixed range to keep the entire system more realistic.
Also a script was made to add currents to the system, for this the Finite-Element-Method is used. However running this script to add it to the simulation takes quiet a while.
Size drones
In order to determine the size of the drones the law of Archimedes was used, which states the downwards force should be equal or less to the upwards force for something to float. To use this the mass of the different components were combined to create a total mass of the drone. This then results in a volume that can be translated to a total volume or area. Using this it was decided to make the drones have an area of approximately 0.8 squared meters. If more components are added to the drone the minimal required size can easily be recalculated using this method.
Like in previous weeks we had extra meetings, here are the notes of those meetings
File:Notes 5-12.pdf
File:Notes 11-12.pdf
This following link is a link to our Dropbox files for this week. There all the files we worked on can be seen to clarify anything missing from the description above.
Week 4: [3]
Week 5
This week was pretty similar to previous weeks. While the simulation teams worked on their parts of the simulation, they were supported by the research teams to make sure they have all the information they need.
Research
The biggest points we needed to make clear this month were:
1) Why do we choose swarm-robotics to solve the problem we have been presented with.
2) What are the requirements for this system
With the problem being driftwood in a harbor (for which we choose the Botlek in Rotterdam as an example) and observing the quality of the water as added task. For this we made a list of requirements we needed of the systems. Using this list we were able to draw conclusions on why we use swarm-robotics. This list of requirements was then increased to also contain the requirements we have for the system itself. This list can be found in the Notes of meeting 15-12. Also in order to be able to solve the driftwood problem, more information was found on object-recognition software. What was found is that there is a lot of software available on this which all works on the principle of comparing the input of images from a camera with a database of recognizable object. When a match is found it is thus recognized. For the communication between the drones multiple data transmission methods were looked at to check their range. This can be quiet small, like a Bluetooth connect with a maximum of around 30 meters. Or a big transmitter, able of sending data thousands of meters. For our application it is needed to keep the equipment quiet small to be able to fit it into the separate drones, while also trying to get the production costs reasonable. For this the best option seems to be a strong WiFi-signal witch can range to around 1000 meters with the right setup.
Simulation
Meanwhile work on the simulation also continued. The hardest challenge here this week was to simulate the streams present in the system. These turned out to be quiet complex not only in the main rivers of the Oude Maas and the Nieuwe Maas, but also within the piece of harbor itself. The tides are also a factor in this that had previously not been included yet. In the end it was decided to neglect the flows within the Botlek itself (but not hose in the Oude- and Nieuwe Maas) because it would not add anything significant to would be missing using only the streams in the main rivers.
In order to help the drones with their assignment of detecting the maximum of a contamination, as well as mapping their environment, we have decided to add a sensor to detect the direction and speed of the flow around them. In the end a complex map was made of these stream which can be found in the Dropbox folder below. In here a Matlab script can be found containing a detailed explanation of how it works and what it does. Meanwhile all different movements were defined for the swarm. These were also tested and found to be working in the simulation itself. This allows the separate drones to move from and towards different sections of the environment and deal with obstacles it faces along the way like other boats or driftwood.
Like in previous weeks we had extra meetings, here are the notes of those meetings
File:Notes 12-12.pdf
File:Notes 15-12.pdf
This following link is a link to our Dropbox files for this week. There all the files we worked on can be seen to clarify anything missing from the description above.
Week 5: [4]
Week 6
For week 6 the main goal was to improve the requirements that were made in week 5. At the moment these were not defined clearly and also needed to be specified more. Besides this we made contact with the RWS to see the problem first-hand. We made an appointment with them where, besides getting more information, also join them on the waters around Eindhoven. Although Eindhoven has a different scale than Rotterdam when looking at driftwood in the harbors, it should still offer a good image.
Meanwhile in the simulation, a script was made to combine the different movements of the drones. This results in an algorithm for the swarm to form a path in the harbor of Rotterdam.
File:Notes 19-12.pdf
As usual, the following link leads to our Dropbox files for this week.
Week 6: [5]
Christmas break
During the christmas break work on the case and the simulation will continue, however due to other activities the progress we make might not be documented here on the wiki as well as previously. If this is missing at the end of the break, an update will be made to include the work done during the holidays.
|
Week 7
Technically week 8, but we decided to not skip a week in our counting.
Not a lot of work was done during the holidays, but were immediately picked up in the first week of the new year again. This included a visit to Rijkswaterstaat (RWS) in Echt near Sittard for more information and a lot of work on the simulation itself.
Rijkswaterstaat
On the 4th of January, Ralf, Zjeraar and Stijn had a meeting with people of the RWS on one of their patrol boats to ask some questions that could be useful for our design. Although hesitant at first, it turned out that the people of the RWS saw some really nice use for the system we are designing. Not only for what we already had in mind, but they also gave some examples of other way the system could be used. This gave a nice boost to the viability of our system since it turned out to be able to applied in a lot more situations on a lot more locations. Some of the examples they gave were for instance to not only use the drones to move driftwood, but also pieces of ice, or to help find missing persons in the water (which turned out to be needed quiet frequent).
We had a number of questions we asked them to gain more insight into how the quality of the water is being controlled at the moment, how driftwood or other objects form a problem on the water and how this gets solved. It was also explained how the regulations work in regards to pollution of the water and how our system could help here.
Simulation
Meanwhile in the simulation work continued. The team responsible for simulating the environment added scripts to simulate driftwood in the water and how this moves through the system thanks to flow and wind. This was also done for pollutions, these can now be added to the system which then calculates and shows how these move and change in the rivers of our environment. At the moment this was done for pollutions altering the pH-value of the water but this can easily be copied to be applied to change the electro-conductivity or oxygen concentration of the water.
The swarm team ran into some difficulty though, this is still behind schedule and although progress is being made, it is going slower than anticipated. At the moment scripts were made to have the swarm divide itself and prioritize certain tasks and the movements of the drones are finalized. One of the hurdles that were found was to have a drone that looking around for driftwood to determine the exact location of a piece of wood, instead of just acknowledging wood being in its vicinity.
For more information about the progress of the project the notes of our last meeting and link to the dropbox folder for this week were added again. Please also note that on the top of the page there is also a link added to the folder of the simulation itself, this way the scripts which have more explanation about their progress can be seen for more clarity.
File:Notes 08-01.pdf
As usual, the following link leads to our Dropbox files for this week.
Week 6: [6]
Week 8
This is the final week to work on the simulation and this is what we focused heavily on. A lot of work still needed to be done to finish the script for the swarm. This then had to be combined with the script for the environment and the combination has to be run in order to get results. These results then had to be analysed and all of this had to be put together in order to present it on Monday the 16th. We had multiple meetings during the week to make sure everything was finished. Of these meetings only our meeting on Monday the 9th had notes made of them which are linked here.
File:Notes 09-01.pdf
|







