MRC/FullExample: Difference between revisions
Jump to navigation
Jump to search
(Created page with '== Full Example == We would like to create a behavior for Pico, in which: # Pico is driving forward, unless a wall is detected. # If a wall is detected, PICO drives backwards for…') |
No edit summary |
||
| Line 7: | Line 7: | ||
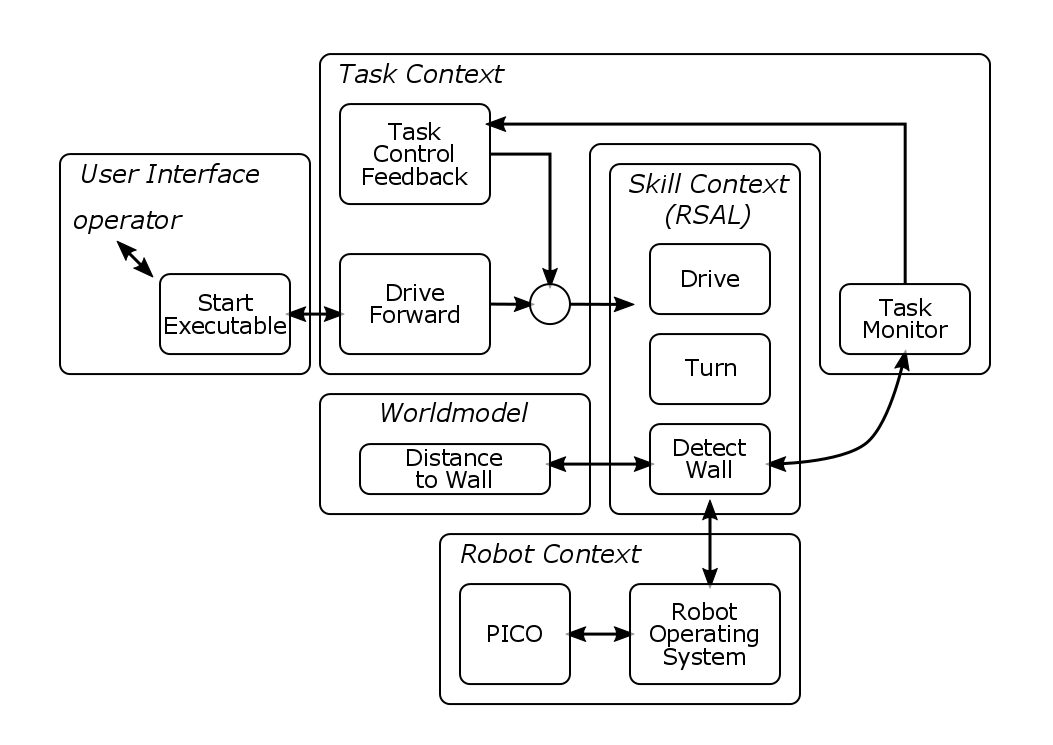
First, we can describe this behavior in a Task-Skill-Motion Framework, which is shown in the figure, here on the right. | First, we can describe this behavior in a Task-Skill-Motion Framework, which is shown in the figure, here on the right. | ||
[[File:TSM_FullExample. | [[File:TSM_FullExample.png|500px|frame|Task-Skill-Motion Framework for Full Example]] | ||
Revision as of 09:49, 3 May 2017
Full Example
We would like to create a behavior for Pico, in which:
- Pico is driving forward, unless a wall is detected.
- If a wall is detected, PICO drives backwards for x metres,
- then turns approx. 90 degrees,
- resumes driving forward.
First, we can describe this behavior in a Task-Skill-Motion Framework, which is shown in the figure, here on the right.

Task-Skill-Motion Framework for Full Example