Embedded Motion Control 2019 Group 4
This is the CSTWiki page for group 4 of Embedded Motion Control 2019.
Group members
| Marcel Bosselaar | 0906127 |
| Ruben Sommer | 0910856 |
| Jeroen Setz | 0843356 |
| Bram Grolleman | 0757428 |
| Martijn Tibboel | 0909136 |
Deliverables
Minutes
Ideas Escape room
The following ideas are used for the excecution of the Escape room.
Plan
The initial strategy that is formulated is as follows:

This plan is updated to gain more insights and control over the different situations that can happen.
[PLAATJE]
Exit recognition
Firstly walls are created from the lrf data. Next, these small walls are merged into large walls. For this, the 'split and merge' method is used as shown below.
Example first step
Example second step
Example third step



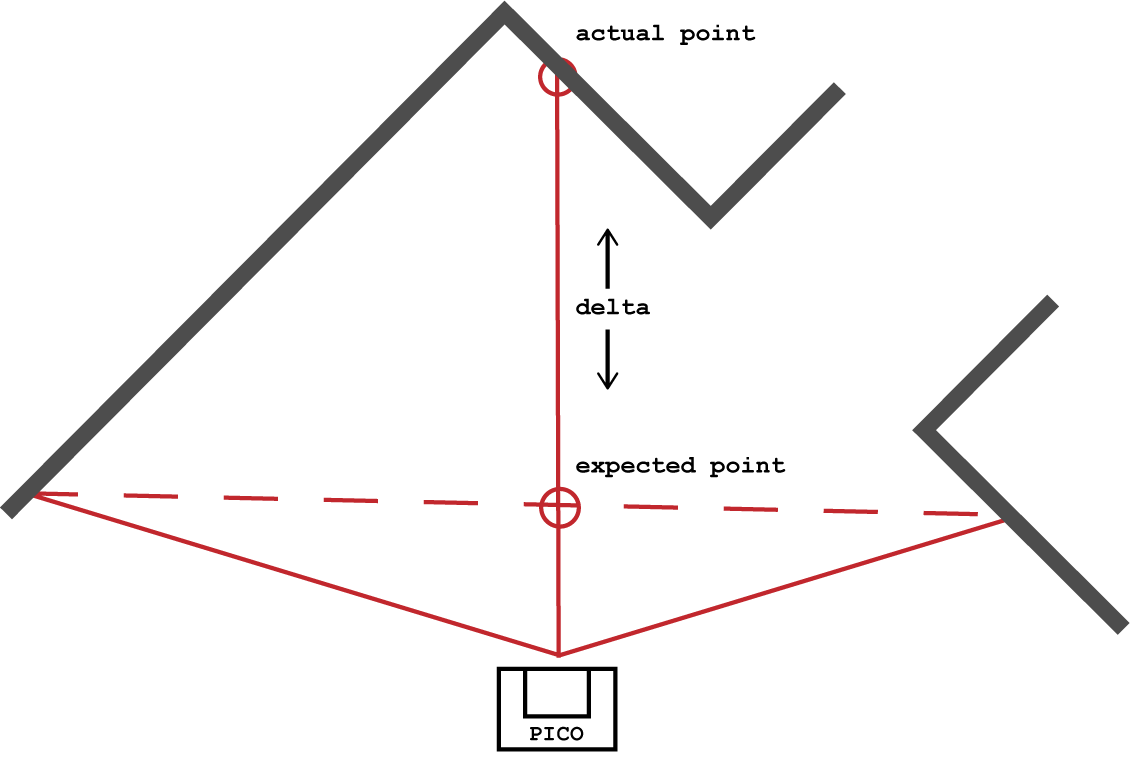
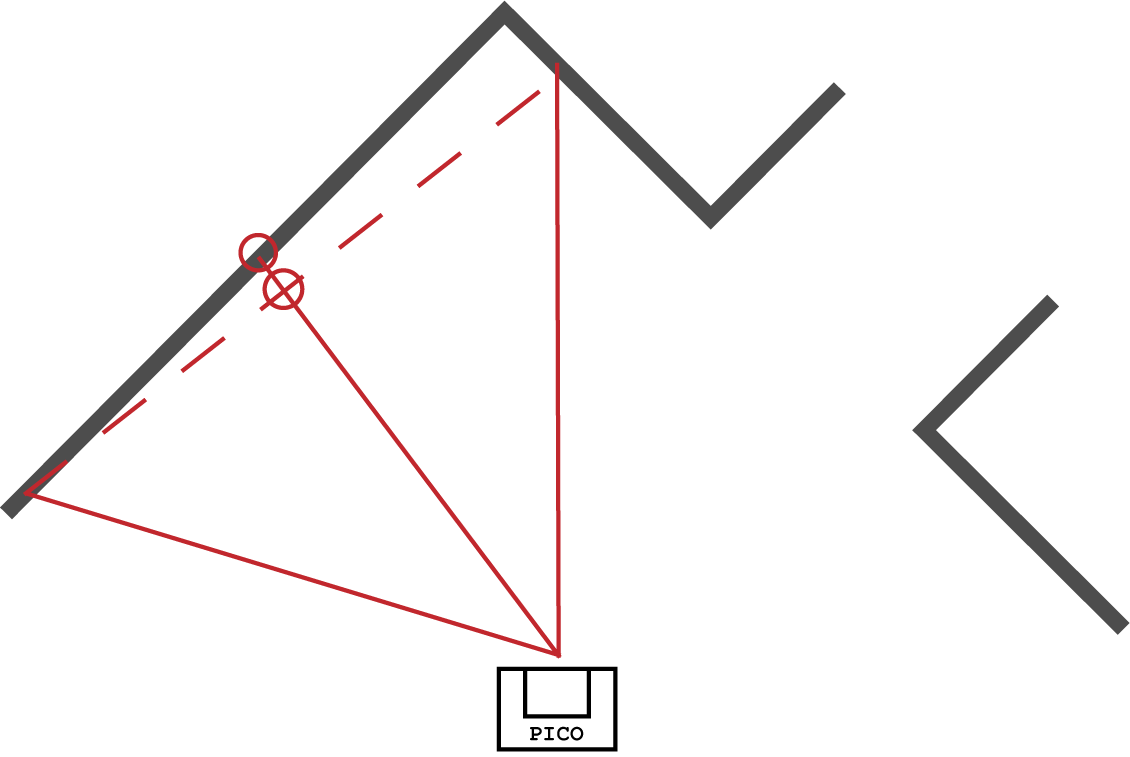
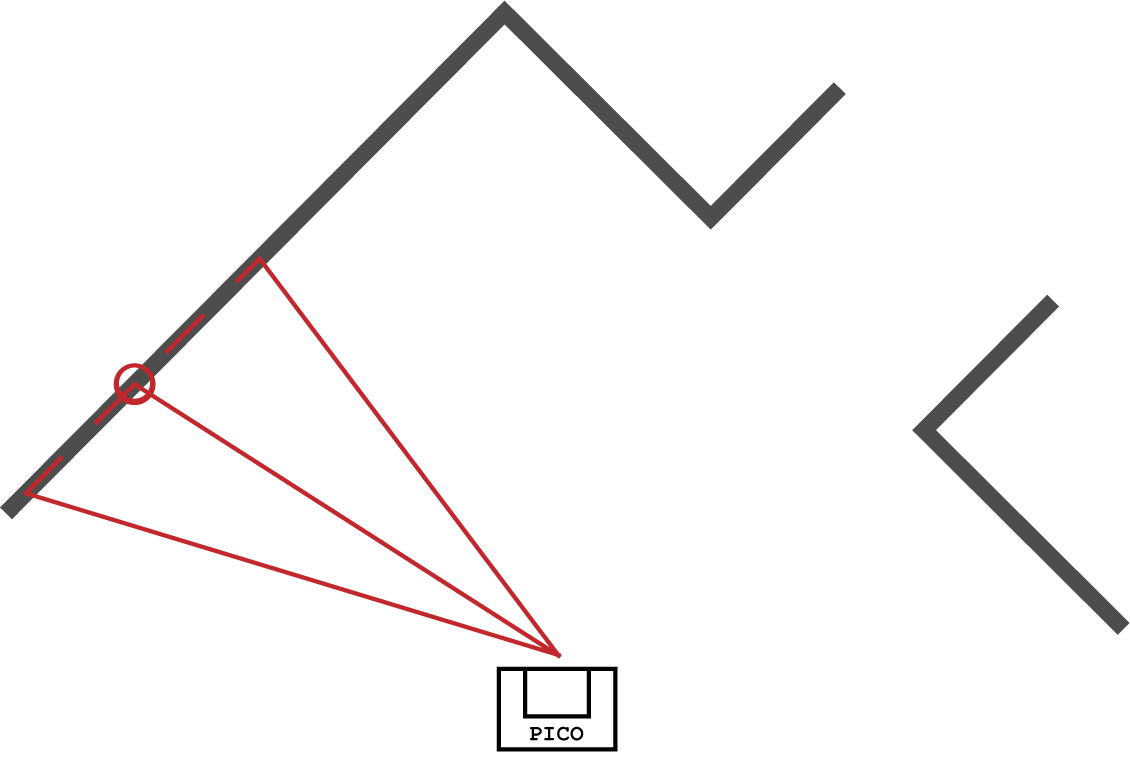
Then the corners are recognized. The 2 different kind of corners are recognized and from the right kind of corners the exit is generated. This is visualised below.

At last, the center point of the exit is calculated together with a point in front of this center point. This point in front is sent to the movement part of the PICO.
Finite state machine
A finite state machine is introduced in order to maintain control over what is happening at all times.
After the challenge, an alternative FSM was thought of that reduces the number of states required and vastly improves accuracy.
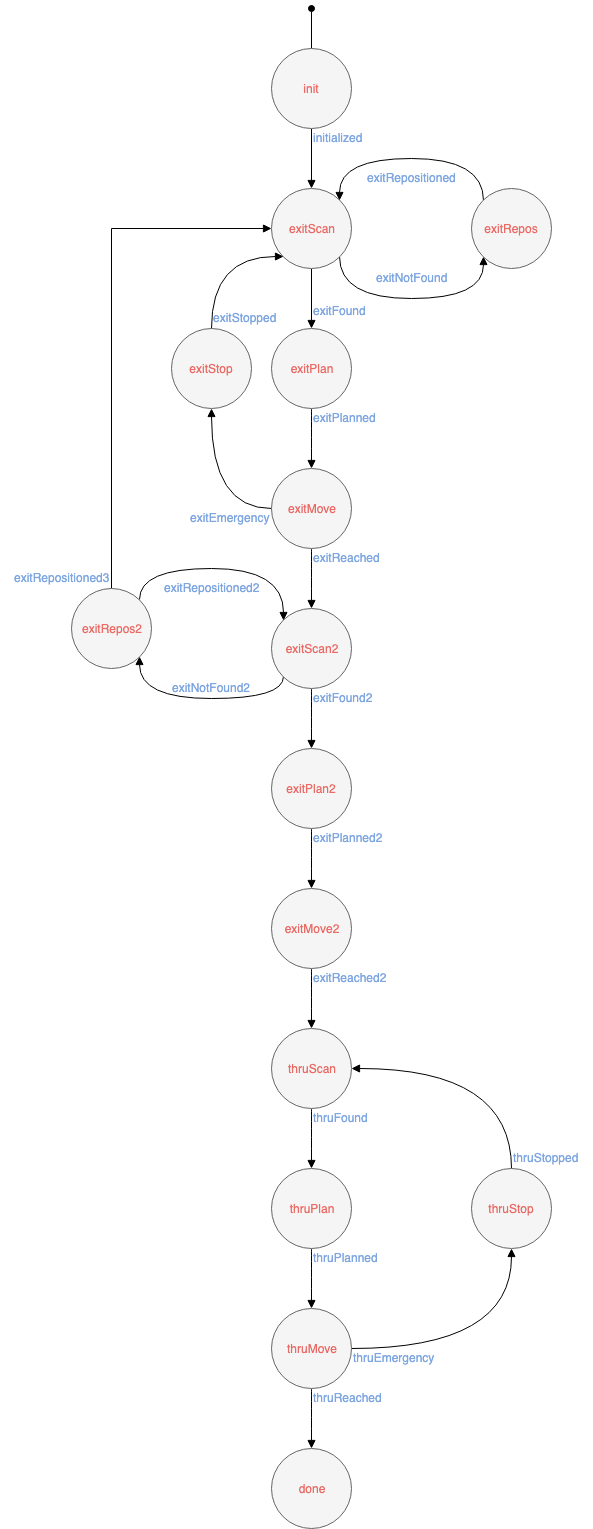
Diagram of the finite state machine used in the escape room competition.
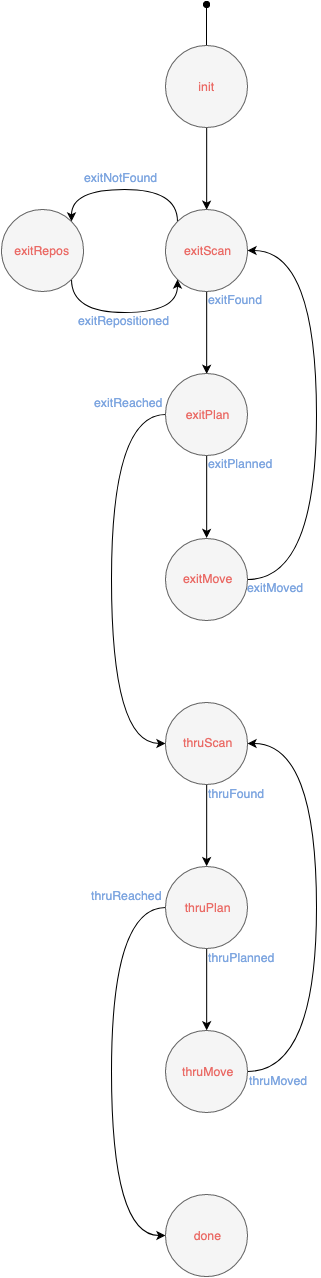
Diagram of an improved FSM, thought of after the competition.
Testing
The following testing dates are set. Also the goal of each testing date is put behind in order to stay on track of the global planning of the project.
- PICO Test 1 (2019-05-08) --> Goal: have PICO detect the exit, and perform simple motion towards it.
- PICO Test 2 (2019-05-13) --> Goal: use a more advanced algorithm to detect and move.
- PICO Test 3 (2019-05-16) --> Goal: Test improvements done based on competition results. If available, test ideas that were previously generated but would only be useful for the final competition.
Escape Room Competition
In the escape room competition, we were potentially the team that had the highest high and the lowest low.
The algorithm we had designed worked perfectly and very quickly. The door was found as soon as it came into view, and PICO decided to move toward the correct location in front of the door. The door was then immediately found again, and PICO's position in front of the door was made more accurate. Then, the exit of the hallway was detected immediately, and PICO drove towards its end goal.
However, due to the fact that we had not managed to implement the odometry into PICO, distances traveled were around 30% too short, meaning PICO stopped well before the detected end of the exit hallway. In addition, telling PICO to drive straight didn't actually make it drive straight, making it graze the wall.
The first improvement we will need to make is the odometry, as we're confident PICO would have exited the room within 30 seconds if it actually was were it thought it was. Secondly, we should use the laser data more frequently, and create new plans during movement to keep things moving in the right direction. Improving the finite state machine to use fewer states and being more circular might also be a good addition.
Hospital Challenge
The following section explains the different functions used in the hospital challenge.
Path planning
Path planning is defined here as finding a way from point A to B based on a known map while avoiding obstacles on this map. In general there are four different approaches to path planning for mobile robotics:
- Cell decomposition
- Divide the map into a grid and define obstacles as cells which can not be used for movement. Then an algorithm as A* or Dijkstra can be used to find the (optimal) path from A to B.
- Potential fields
- A map is converted to a potential field map in which obstacles have high values and free space low. This way a path from A to B can be created which follows the lowest potentials.
- Sampling based
- A sampling based algorithm finds points in the free space of a map and tries to connect them. Then a path is found from A to B following these points. Examples are a Rapidely-expanding Random Tree (RRT) or a probabilistic roadmap.
The requirement set for a path planning algorithm was to avoid a grid (to prevent scalability issues and limited cell resolution) and potential fields (as followed from the Do's and Don'ts lecture). Therefore one candidate remained: sampling based. The choice was made to use a RRT algorithm as is seemed easier to implement compared to a probabilistic roadmap.
Rapidly-expanding Random Tree algorithm
A RRT algorithm starts with a root node. In this case the initial position of PICO. Each iteration a random point is created in the space of the map. The closest node of the tree to the random point is chosen to extend the tree in the direction of the random point. The connection of the newly placed node will be checked for validity (i.e. not colliding with obstacles on the map). This way the random tree will eventually span the complete free space. The algorithm terminates if the goal point B is reached with the tree. An open-source existing algorithm is used which creates a basic random tree. This is modified to work with our software. Two (major) additions are done to the existing algorithm.
RRT end point bias
To ensure a quick convergence of the tree towards the end goal (point B), an endpoint bias is used. This means that every few iterations the algorithm does not use a random point is space but the end goal. This way the tree will be extended in the direction of the goal. This proved to achieve a much faster algorithm which required a lot less iterations to find a path. The end point bias may to be too large (i.e. take every other random point as the end point) as the algorithm can get trapped in corners between obstacles.
RRT path splitting
A drawback of the RRT algorithm is that it will find a path which is generally not optimal. To optimize the found path, a splitting algorithm is used similliar to the splitting algorithm used to find walls in LRF data. It first tries to connect the start and end point of the path to see if it can be connected with a straight line without colliding with obstacles. If this fails, the check is done using the middle point of the path. This is done recursively to optimize the path. In the worst case scenario the original path will be retrieved again. The RRT splitting method showed to create nice straight lines between all points on the path, this still does not create an optimal path, but an optimized version of the original found path.