Embedded Motion Control 2017 Group 5
Results & Discussion
During the maze challenge PICO was executing the implemented Pledge algorithm with a right hand follower. It was also checking for doors in the walls of the maze continuously. As can be seen in the video of the top view of the maze challenge below, PICO finds a door and rings a bell so that this door opens. After this door has been opened, PICO defines its driving direction as the initial direction. When the robot bumps into a wall, the right wall follower is engaged and PICO starts following this wall. Unfortunately, PICO got stuck in a deadlock situation and therefore was not able to exit the maze. A top-view recording of both attempts when PICO tried to find the exit of the maze is shown in the left video below. In the right video, a recording of PICO during the maze challenge is presented that is recorded from the side of the maze.
|
Recording of the maze challenge (top view) 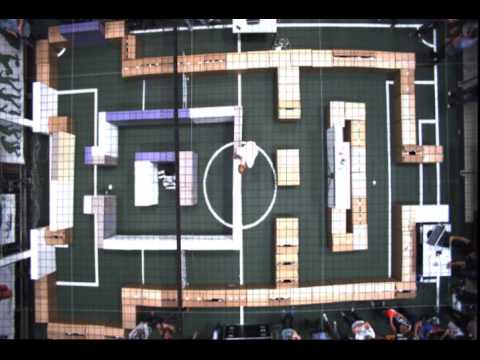 |
Recording of the maze challenge (side view)  |
To identify the problem that occurred in the real maze during the final challenge, both the simulation video as shown above and the recorded video of the maze challenge are compared. An extensive description of the these videos with PICOs actions can be found on the maze simulation page for the simulation and on the maze recording page for the top-view recording, which are listed with according time stamps. From the analysis of both videos, it can be concluded that there are a number of differences in the behaviour of PICO. Below the differences between the simulation with the maze challenge code without improvements and recording of the maze challenge are depicted:
- In the beginning of the simulation PICO detects a fake door to the right (0:04), compared to nothing in the real maze (0:04).
- When PICO has found its way out of the internal square, PICO moves sidewards in the simulation (0:19) and turns left during the maze challenge for both attempts (0:48 and 4:32).
- In the simulation PICO opens the first door and ignores it instead of driving through it (0:33). During the maze challenge, PICO opens the same door and drives through it in both attempts (attempt 1: 1:24 and attempt 2: 5:11).
- Furthermore, PICO gets in a deadlock state when it almost has reached the exit of the maze. This makes the robot decide to go back into the maze and repeats this several times until it is stopped by the user. During the second attempt the same happens twice, after which PICO gets out of the deadlock state (6:37) and continues its way. Unfortunately, the challenge is stopped due to the time limit.
A reason for PICO behaving the way as it did during the maze challenge is that the initial direction is reset after a door has been detected. As can be seen in the recordings, PICO detects a door and rings the bell in both attempts just before exiting the internal square of the maze (attempt 1: 0:48 and attempt 2: 4:32). When the robot moves through this fake door, the 'North direction' is reset and PICO drives forward until the next wall in front is reached and the right-hand following is started. In the simulation simulation, PICO does not detect a door here and therefore continues to follow the wall to its right.
The deadlock state in which PICO gets when it is nearing the exit of the maze can be declared by an incorrect implementation of the detection dead ends. At the point where PICO gets into the deadlock state, this implementation possibly influenced the Pledge algorithm by detecting dead ends instead of 90° corners. During the second attempt PICO finally gets out of the deadlock state, which can be explained by a little different position compared to the first attempt, which then causes PICO to deploy an alignment maneuver. After this, the Pledge algorithm continued with the right-hand following.